Archive for October, 2011
tmp36
I’ve switched over to this sensor as a solid state temperature sensor:
I will use thermocouples for rapid rate of changes of liquids but for environmental sensing:
from adafruit:

temperature from tmp36 sensor: http://www.ladyada.net/learn/sensors/tmp36.html
0.73 volts
22.75 degrees C
72.96 degrees F
0.73 volts
//TMP36 Pin Variables
int sensorPin = 0; //the analog pin the TMP36's Vout (sense) pin is connected to
//the resolution is 10 mV / degree centigrade with a
//500 mV offset to allow for negative temperatures
/*
* setup() - this function runs once when you turn your Arduino on
* We initialize the serial connection with the computer
*/
void setup()
{
Serial.begin(9600); //Start the serial connection with the computer
//to view the result open the serial monitor
}
void loop() // run over and over again
{
//getting the voltage reading from the temperature sensor
int reading = analogRead(sensorPin);
// converting that reading to voltage, for 3.3v arduino use 3.3
float voltage = reading * 5.0;
voltage /= 1024.0;
// print out the voltage
Serial.print(voltage); Serial.println(" volts");
// now print out the temperature
float temperatureC = (voltage - 0.5) * 100 ; //converting from 10 mv per degree wit 500 mV offset
//to degrees ((volatge - 500mV) times 100)
Serial.print(temperatureC); Serial.println(" degrees C");
// now convert to Fahrenheight
float temperatureF = (temperatureC * 9.0 / 5.0) + 32.0;
Serial.print(temperatureF); Serial.println(" degrees F");
delay(1000); //waiting a second
}
IR proximity sensor
Here’s the Sharp product i’m using: http://www.sparkfun.com/datasheets/Sensors/Infrared/gp2y0a02yk_e.pdf
bought from here: http://www.sparkfun.com/products/8958

This code is simply smoothing an analog input value (0-5V), and it seems to work ok, but I have to see – I’m working on graphing the values (using Excel and CoolTerm) to make sure that my linearizing function I got from here: http://www.acroname.com/robotics/info/articles/irlinear/irlinear.html = has worked correctly
const int numReadings = 100;
int readings[numReadings]; // the readings from the analog input
int index = 0; // the index of the current reading
int total = 0; // the running total
int average = 0; // the average
int inputPin = A0;
void setup()
{
// initialize serial communication with computer:
Serial.begin(9600);
// initialize all the readings to 0:
for (int thisReading = 0; thisReading < numReadings; thisReading++)
readings[thisReading] = 0;
}
void loop() {
// subtract the last reading:
total= total - readings[index];
// read from the sensor:
readings[index] = analogRead(inputPin);
// add the reading to the total:
total= total + readings[index];
// advance to the next position in the array:
index = index + 1;
// if we're at the end of the array...
if (index >= numReadings)
// ...wrap around to the beginning:
index = 0;
// calculate the average:
average = total / numReadings;
// send it to the computer as ASCII digits
Serial.println(average);
}
This code also is seems good but I have to check it out more closely:
int sensorPin = 0; // input pin for the sensor
int barPin[] = {2, 3, 4, 5, 6, 7, 8, 9, 10, 11};
int barPinCount = 10;
int volt = 0; // variable to store the value coming from the sensor
int zeit = 100; // *10 = Gesamtzeit - total time
void setup() {
Serial.begin(9600);
int thisPin;
// the array elements are numbered from 0 to (pinCount - 1).
// use a for loop to initialize each pin as an output:
for (int thisPin = 0; thisPin < barPinCount; thisPin++) {
pinMode(barPin[thisPin], OUTPUT);
}
}
void loop() {
int volt = 0;
for(int i=0; i<10; i++)
{
volt += analogRead(sensorPin);
delay(zeit);
}
volt /= 10;
Serial.println(volt);
int litCount = 0;
if (volt <= 82) {
// >= 80cm
litCount = 1;
} else if (volt <= 92) {
// >= 70cm
litCount = 2;
} else if (volt <= 102) {
// >= 60cm
litCount = 3;
} else if (volt <= 123) {
// >= 50cm
litCount = 4;
} else if (volt <= 154) {
// >= 40cm
litCount = 5;
} else if (volt <= 184) {
// >= 30cm
litCount = 6;
} else if (volt <= 266) {
// >= 20cm
litCount = 7;
} else if (volt <= 328) {
// >= 15cm
litCount = 8;
} else if (volt <= 461) {
// >= 10cm
litCount = 9;
} else if (volt > 461) {
// < 10cm
litCount = 10;
}
for(int b=0; b<10; b++)
{
if(b<=litCount)
digitalWrite(barPin[b], HIGH); // Turn the bar on
else
digitalWrite(barPin[b], LOW); // Turn the bar off
}
}
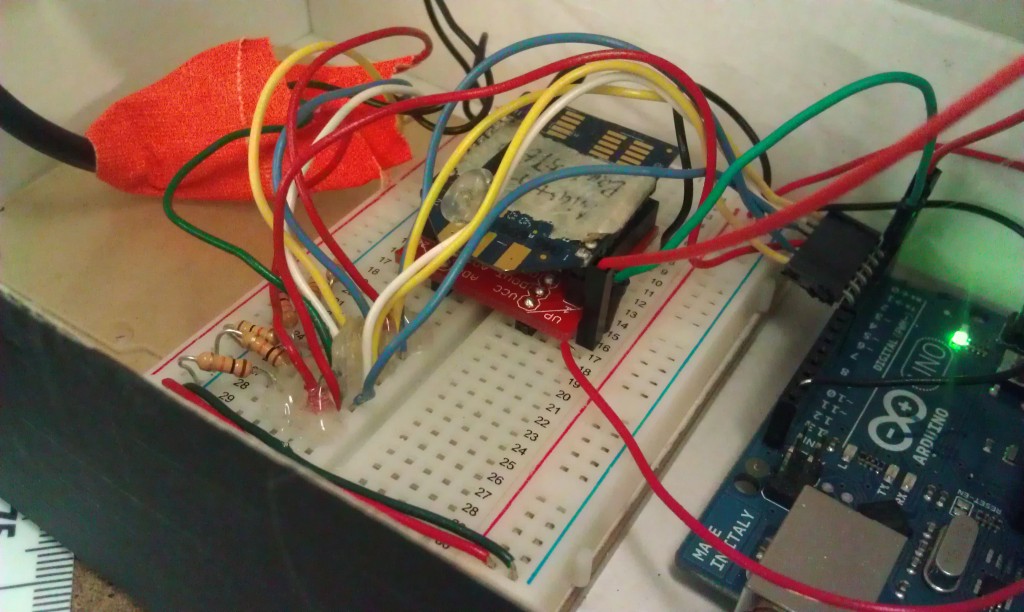
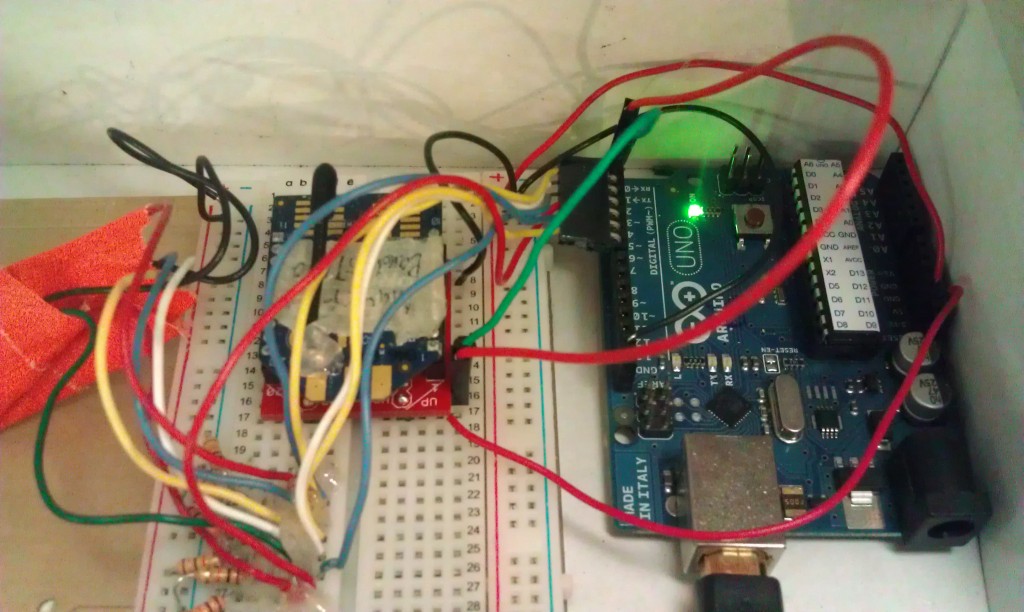
circuit – SHT11 humidity sensor
I found a super nice library – https://github.com/practicalarduino/SHT1x – it’s working way better than what I had going before – Thanks!
I’m using this schematic: using this http://www.parallax.com/dl/docs/prod/acc/SensirionDocs.pdf

I’m getting legible values :
Temperature: 25.4199981689C / 77.8459930419F. Humidity: 23.45%
Temperature: 25.4399948120C / 77.8639984130F. Humidity: 23.45%
Temperature: 25.4799957275C / 77.7919921875F. Humidity: 25.12%
Temperature: 25.4599990844C / 77.8999938964F. Humidity: 27.65%
Temperature: 25.3600006103C / 77.7739944458F. Humidity: 27.87%
Temperature: 25.5199966430C / 77.9719924926F. Humidity: 26.86%
circuit – 2 axis parallax accelerometer

This is on the arduino side:
int pinX = 3;
int pinY = 2;
unsigned long serialTimer = millis();
unsigned long xAcc = 0;
unsigned long yAcc = 0;
boolean flipflop;
void setup()
{
pinMode(pinX, INPUT);
pinMode(pinY, INPUT);
Serial.begin(115200);
}
void loop()
{
if (flipflop == true) {
xAcc = pulseIn(pinX, HIGH);
flipflop = false;
} else {
yAcc = pulseIn(pinY, HIGH);
flipflop = true;
}
if ((millis() - serialTimer) > 50 ) {
Serial.print("X ");
Serial.println(xAcc);
// Serial.print(" ");
Serial.print("Y ");
Serial.println(yAcc);
}
}
to visualize it:
in processing:
import processing.serial.*;
Serial port; // Create object from Serial class
int val; // Data received from the serial port
int xAngle;
int yAngle;
void setup()
{
println ( Serial.list());
size(200, 200,P3D);
frameRate(10);
// Open the port that the board is connected to and use the same speed (9600 bps)
port = new Serial(this, Serial.list()[0],115200);
port.bufferUntil(13);
lights();
}
void draw()
{
background(0);
directionalLight(51, 102, 126, 0, 0, -1);
translate(100,100,0);
rotateX(map(xAngle,3800,6300,-1 * HALF_PI,HALF_PI));
rotateY(map(yAngle,3800,6300,-1 * HALF_PI,HALF_PI));
translate(-50,-50,0);
rect(0,0,100,100);
}
void serialEvent(Serial p) {
String msg = port.readStringUntil(13);
if (msg != null) readMsg(msg);
}
void readMsg(String msg) {
//remove non printing chars
int badChars = 0;
for (int i = msg.length() -1; i >= 0; i--) {
char c = msg.charAt(i);
if ( c == 10 || c ==13) {
badChars++;
}
}
if (badChars > 0) msg = msg.substring(0,msg.length()-badChars+1);
String[] words = splitTokens(msg);
if (words[0].equals("X")) {
xAngle = int( words[1]);
}
if (words[0].equals("Y")) {
yAngle = int( words[1]);
}
}













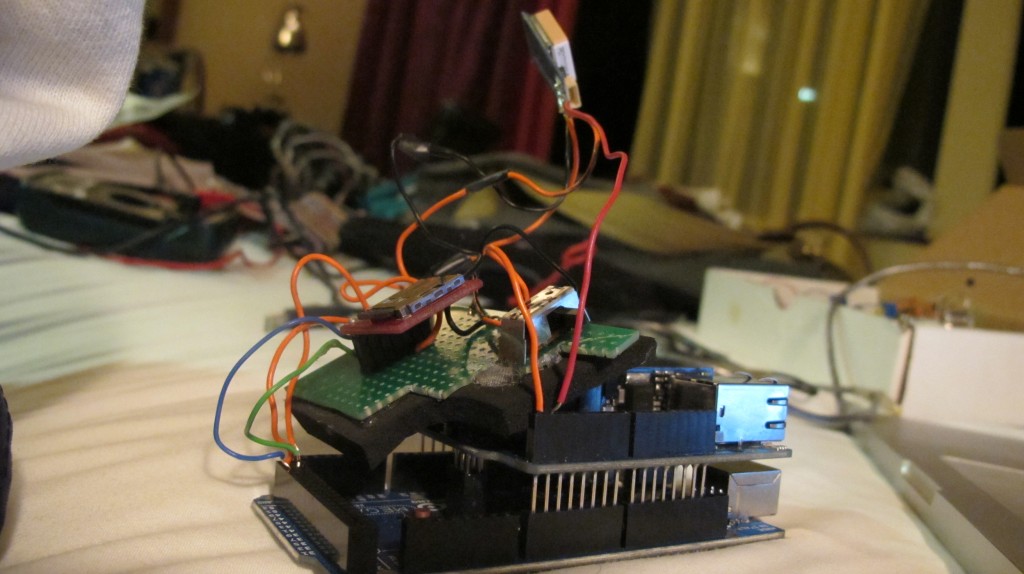
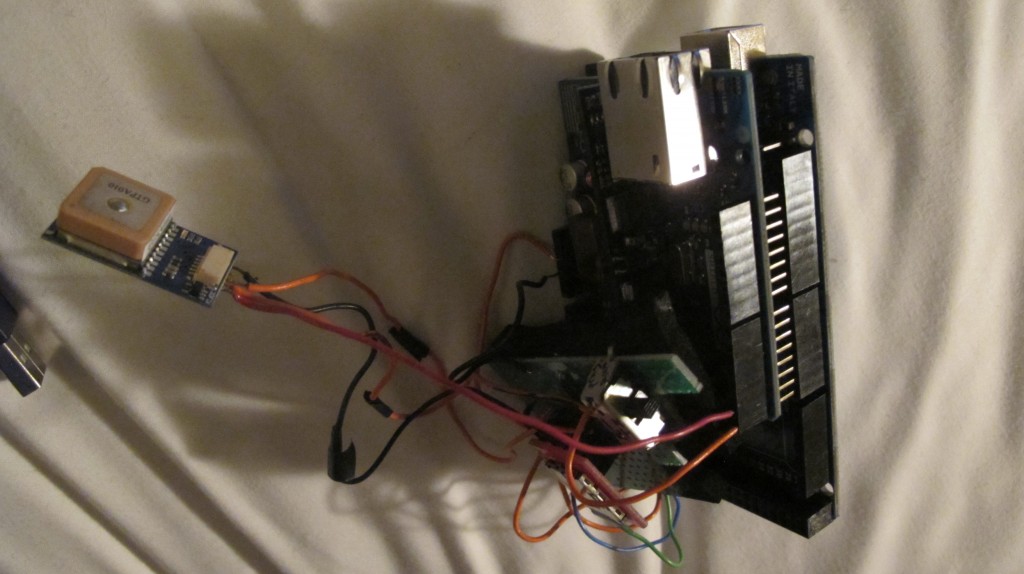
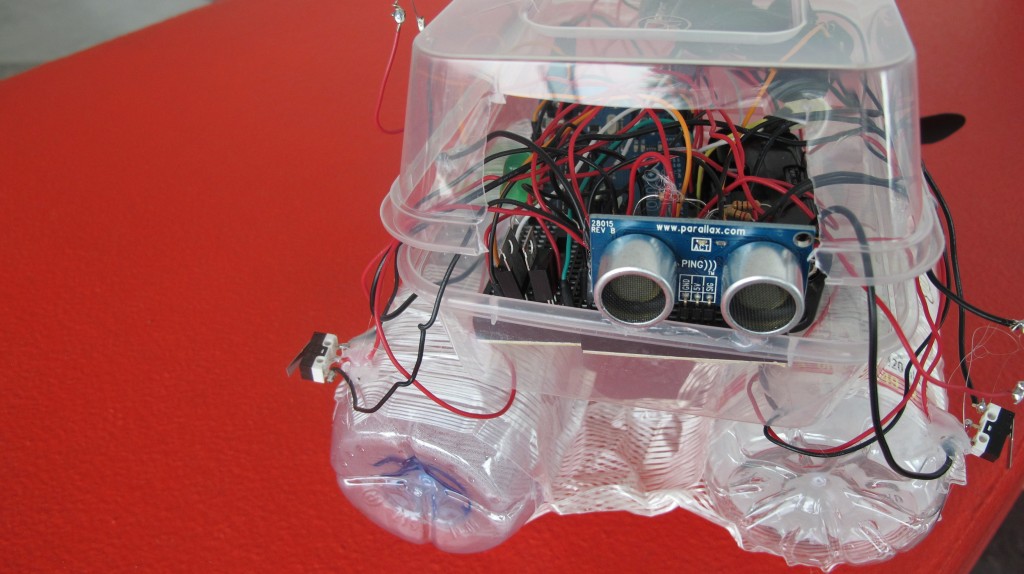
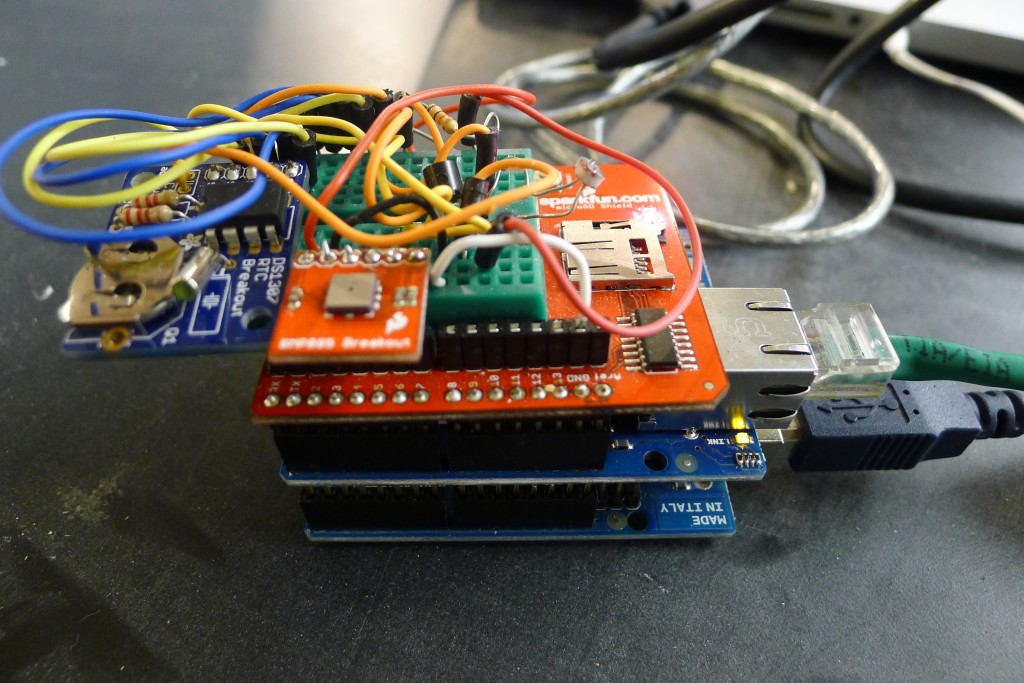
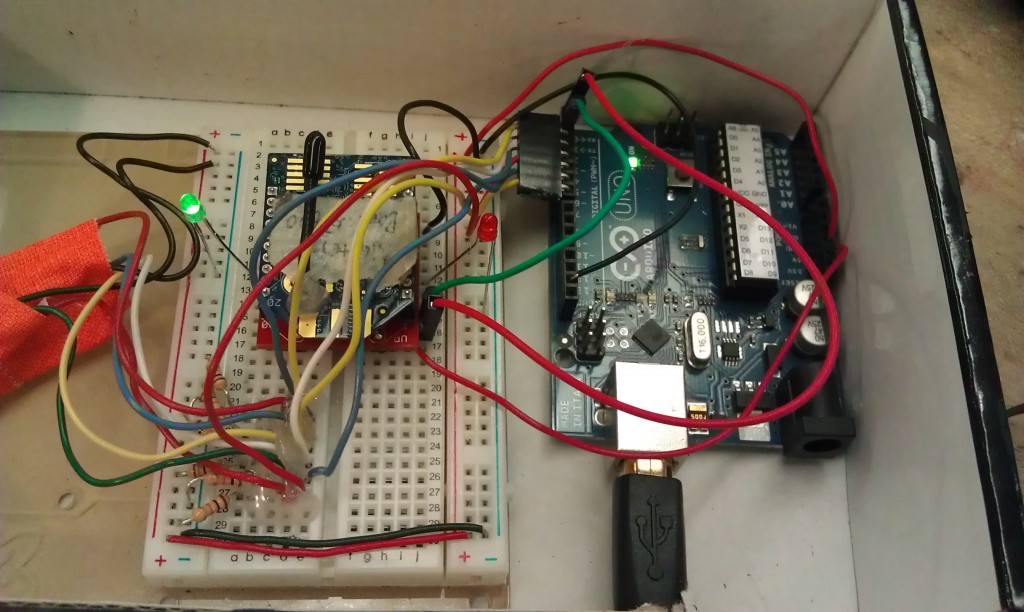
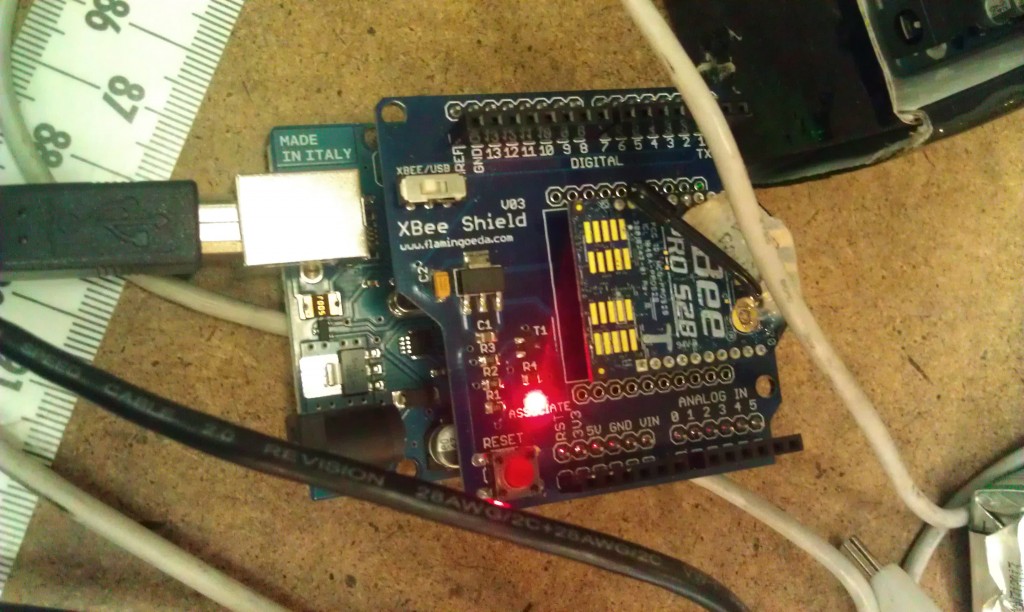
Moving onto the mega (++ sensors, no computer, data to the server)
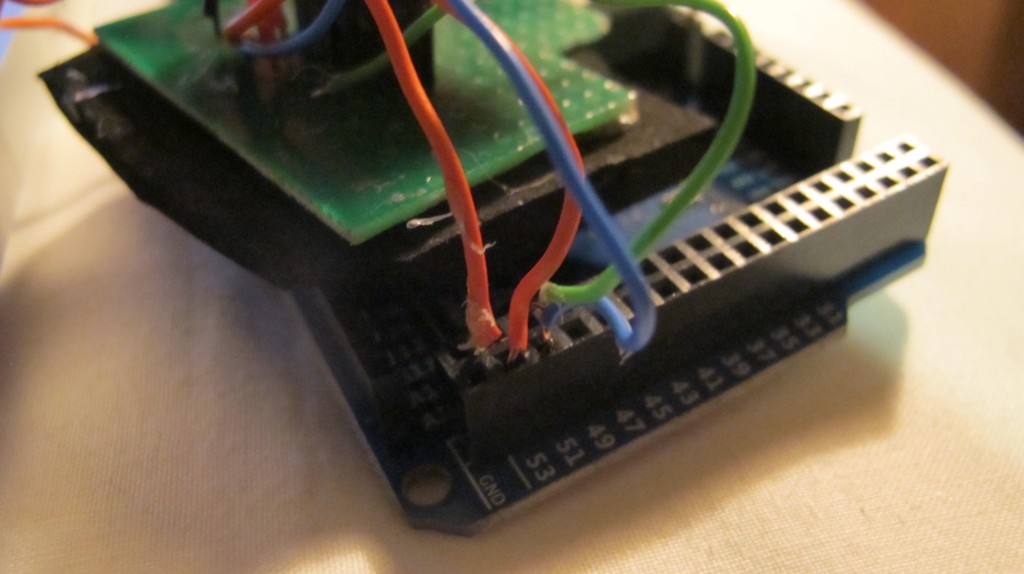
A note about the Mega and the spi library: (for use with the SD card and ethernet shield)
On Arduino MEGA, SPI bus uses pins 51 (MOSI), 52(SCK), 50(MISO), and 53(SS)
Sensors include: humidity, barometric, light, temp, gps, rtc, accelerometer, more to come…
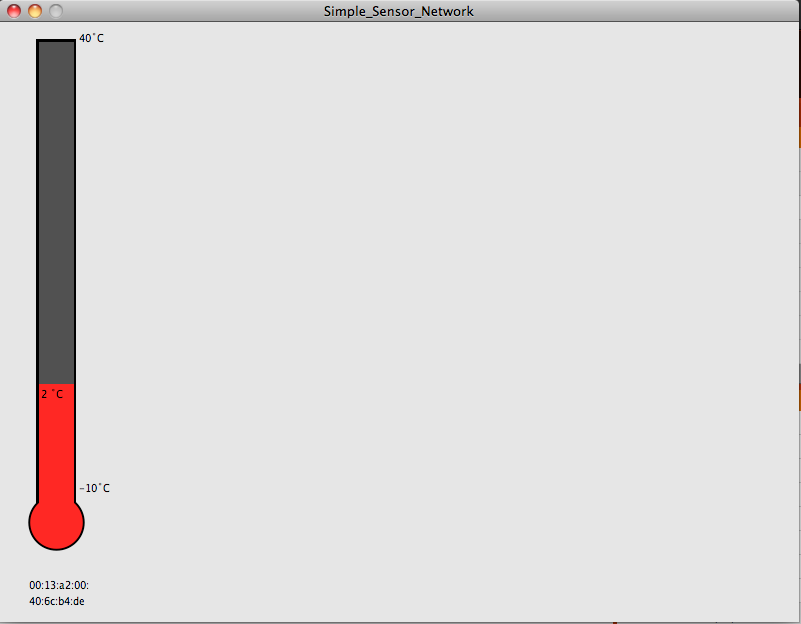
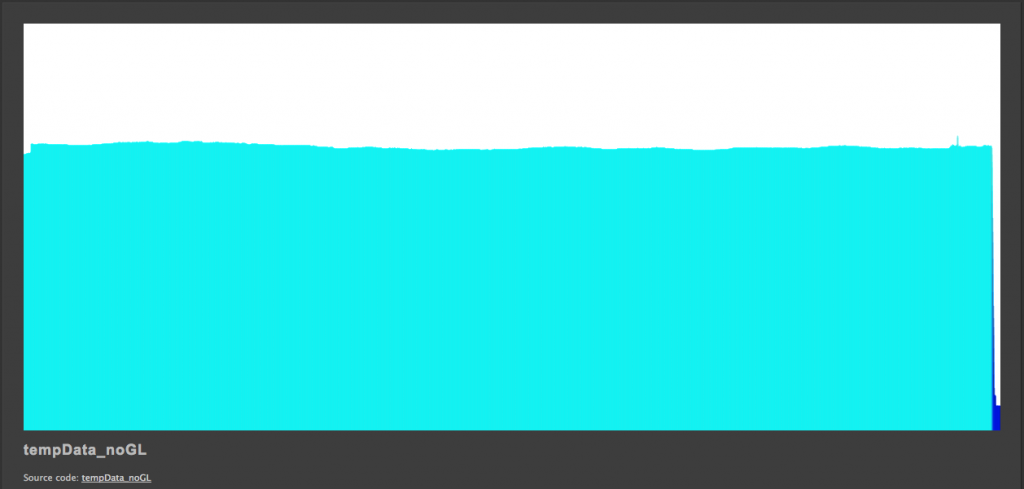
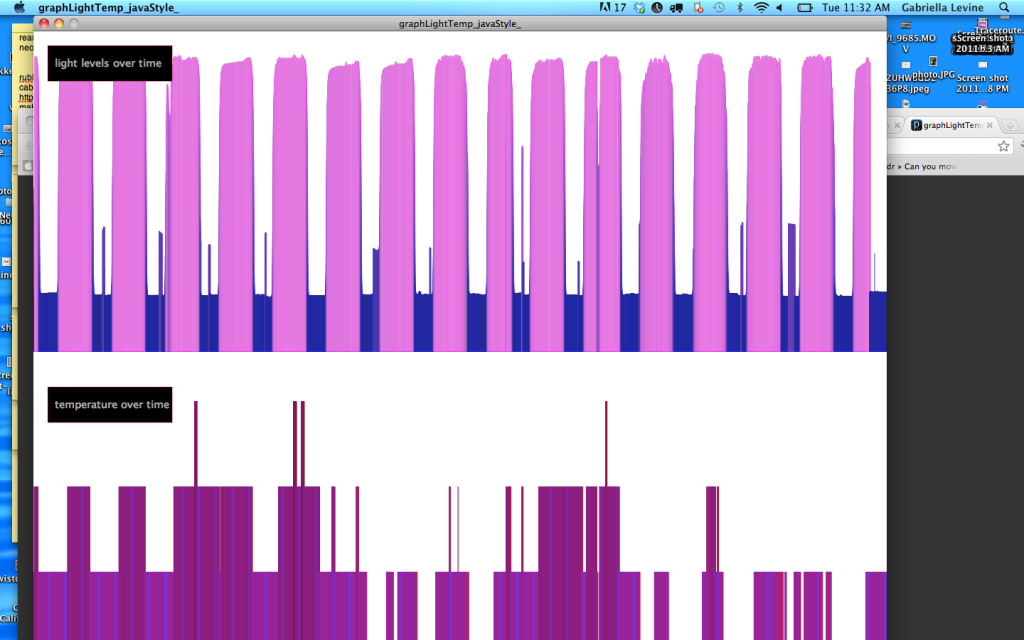
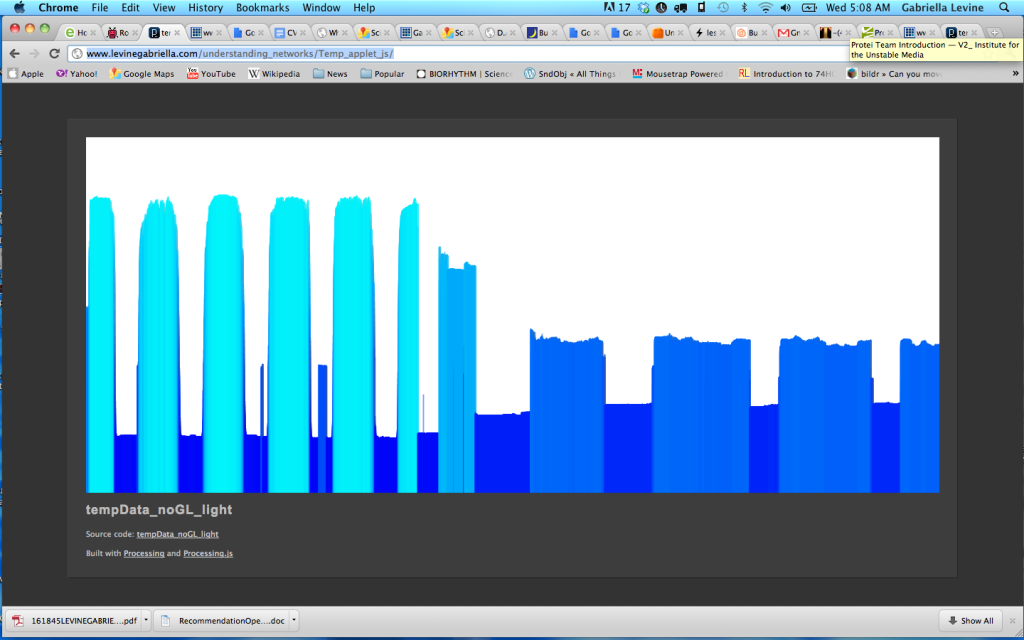
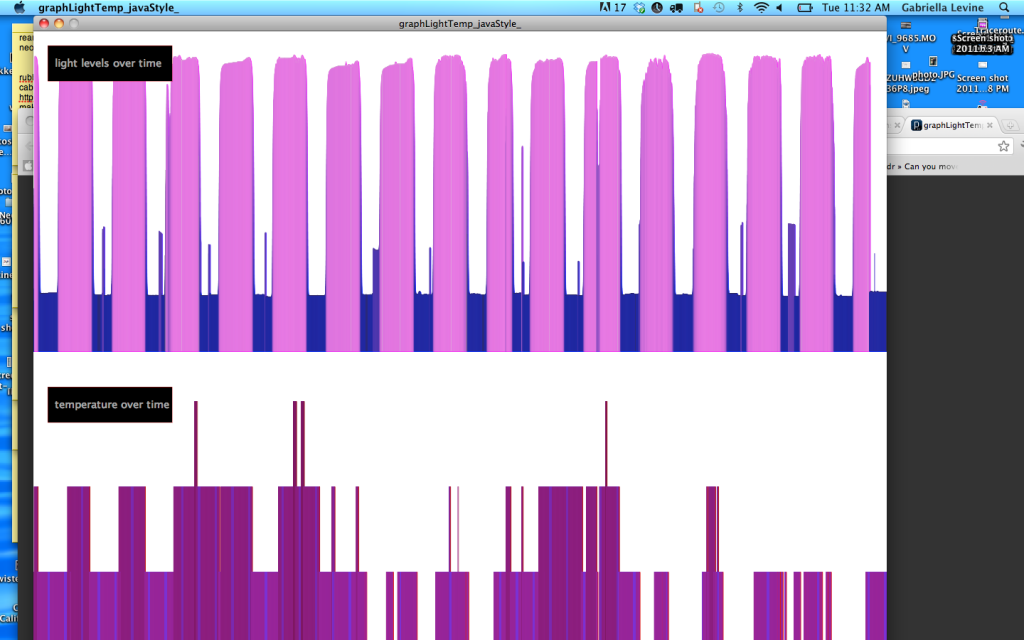
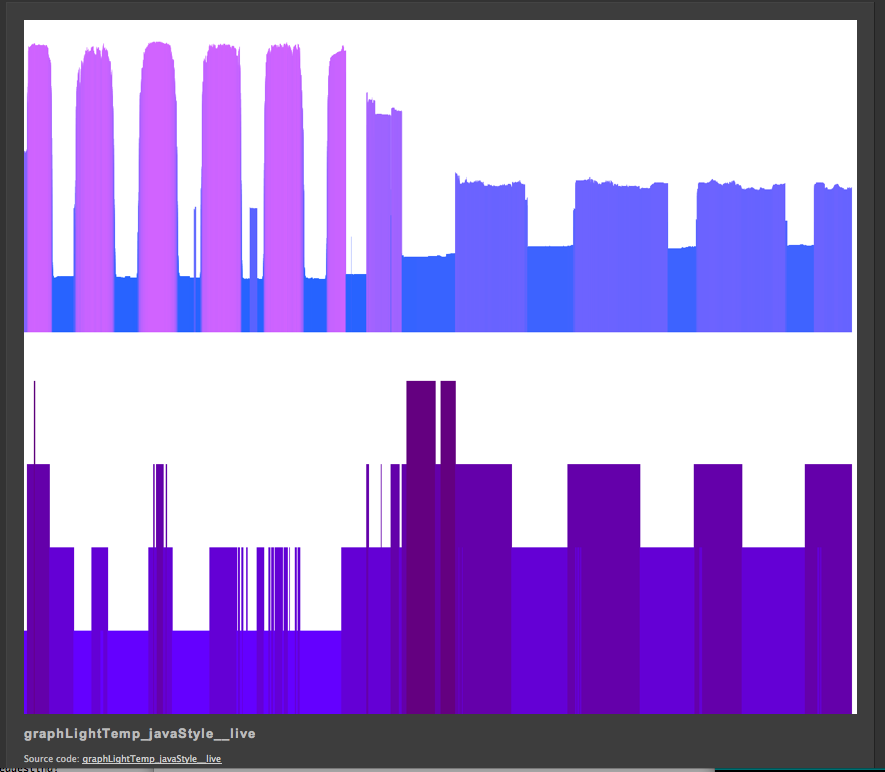
connects to a graph:
logs sensor data to a text file which gets written to a server: www.levinegabriella.com/understanding_networks/dataLogger.php
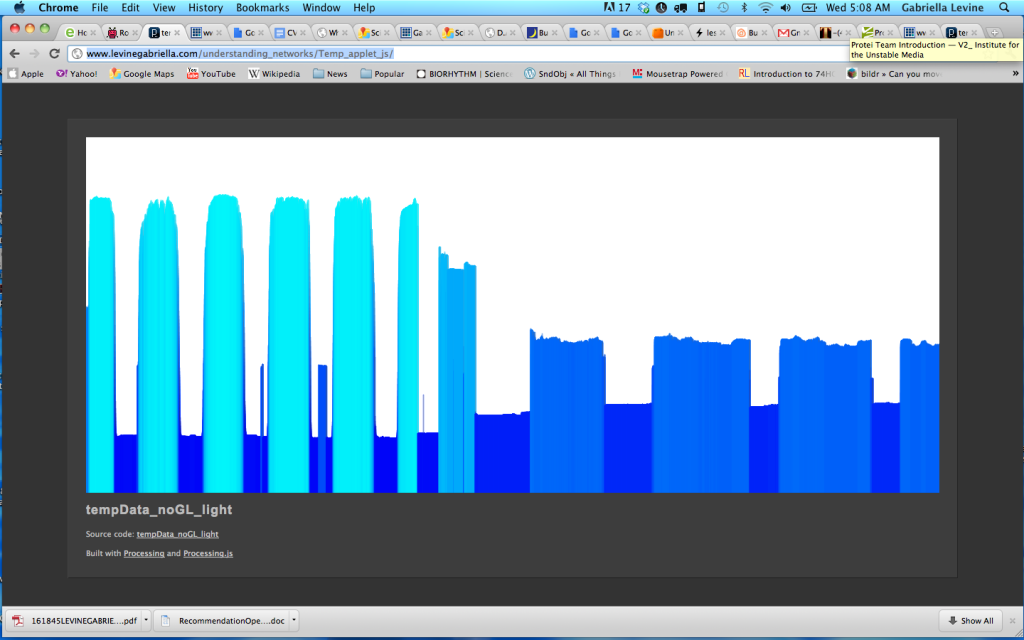
www.levinegabriella.com/understanding_networks/Temp_applet_js
<code>/*
Web client
This sketch connects to a website (http://www.google.com)
using an Arduino Wiznet Ethernet shield.
Circuit:
* Ethernet shield attached to pins 10, 11, 12, 13
created 18 Dec 2009
by David A. Mellis
*/
#include &amp;lt;Wire.h&amp;gt;
#include &amp;lt;SPI.h&amp;gt;
#include &amp;lt;Ethernet.h&amp;gt;
#include &amp;quot;RTClib.h&amp;quot;
#include &amp;lt;SD.h&amp;gt;
#define BMP085_ADDRESS 0x77 // I2C address of BMP085
const unsigned char OSS = 0; // Oversampling Setting
// Calibration values
int ac1;
int ac2;
int ac3;
unsigned int ac4;
unsigned int ac5;
unsigned int ac6;
int b1;
int b2;
int mb;
int mc;
int md;
// b5 is calculated in bmp085GetTemperature(...), this variable is also used in bmp085GetPressure(...)
// so ...Temperature(...) must be called before ...Pressure(...).
long b5;
short temperature;
long pressure;
// Enter a MAC address for your controller below.
// Newer Ethernet shields have a MAC address printed on a sticker on the shield
byte mac[] = {
0x00, 0xAA, 0xBB, 0xCC, 0xDE, 0x03 };
IPAddress server(69,89,31,63); // my IP server
const int requestInterval = 30000;
long lastAttemptTime = 0; // last time you connected to the server, in milliseconds
boolean requested;
const int resetLED = 13;
float temp;
float voltage;
// Initialize the Ethernet client library
// with the IP address and port of the server
// that you want to connect to (port 80 is default for HTTP):
const int chipSelect = 53;//changed from 8
const int LOCATION_FILE_NUMBER_LSB = 0x00;
const int LOCATION_FILE_NUMBER_MSB = 0x01;
File dataFile;
RTC_DS1307 RTC;
EthernetClient client;
DateTime now;
int ledPin = 13; // LED test pin to determine if we are successfully writing gps strings to a text file
int ledState = LOW;
int rxPin = 0; // RX PIN
int txPin = 1; // TX TX
void setup() {
pinMode(ledPin, OUTPUT); // Initialize LED pin
pinMode(rxPin, INPUT);
pinMode(txPin, OUTPUT);
// start the serial library:
Serial.begin(38400);
pinMode(A2, OUTPUT);
pinMode(A3, OUTPUT);
// A2 is the ground, A3 is the power:
digitalWrite(A2, LOW);
digitalWrite(A3, HIGH);
pinMode(chipSelect, OUTPUT);
if (!SD.begin(chipSelect)) {
Serial.println(&amp;quot;Card failed, or not present&amp;quot;);
// don't do anything more:
}
Serial.println(&amp;quot;card initialized.&amp;quot;);
Wire.begin();
RTC.begin();
delay(50);
bmp085Calibration();
if (! RTC.isrunning()) {
Serial.println(&amp;quot;RTC is NOT running!&amp;quot;);
// following line sets the RTC to the date &amp;amp;amp; time this sketch was compiled
RTC.adjust(DateTime(__DATE__, __TIME__));
}
dataFile = SD.open(&amp;quot;data.txt&amp;quot;, FILE_WRITE);
delay(500);
// start the Ethernet connection:
Ethernet.begin(mac);
if (Ethernet.begin(mac) == 0) {
Serial.println(&amp;quot;Failed to configure Ethernet using DHCP&amp;quot;);
// no point in carrying on, so do nothing forevermore:
// for(;;)
// ;
}
// connectToServer();
// give the Ethernet shield a second to initialize:
delay(1500);
blink(resetLED, 3);
Serial.println(&amp;quot;connecting...&amp;quot;);
connectToServer();
}
// Stores all of the bmp085's calibration values into global variables
// Calibration values are required to calculate temp and pressure
// This function should be called at the beginning of the program
void bmp085Calibration()
{
ac1 = bmp085ReadInt(0xAA);
ac2 = bmp085ReadInt(0xAC);
ac3 = bmp085ReadInt(0xAE);
ac4 = bmp085ReadInt(0xB0);
ac5 = bmp085ReadInt(0xB2);
ac6 = bmp085ReadInt(0xB4);
b1 = bmp085ReadInt(0xB6);
b2 = bmp085ReadInt(0xB8);
mb = bmp085ReadInt(0xBA);
mc = bmp085ReadInt(0xBC);
md = bmp085ReadInt(0xBE);
}
void loop()
{
temperature = bmp085GetTemperature(bmp085ReadUT());
pressure = bmp085GetPressure(bmp085ReadUP());
now = RTC.now();
if(client.connected()){
if(!requested){
requested = makeRequest();
// Serial.println(&amp;quot;requesting!&amp;quot;);
}
if(millis() - lastAttemptTime&amp;gt;requestInterval){
//if youre not connected and two minutes have passed, attempt to connect again
client.stop();
// Serial.println(&amp;quot;stopping and reconnecting!&amp;quot;);
// getData();
delay(1500);
//connectToServer();
}
// if there are incoming bytes available
// from the server, read them and print them:
}
if (client.available()) {
char c = client.read();
// Serial.print(c);
}
// if the server's disconnected, stop the client:
if (!client.connected()) {
// Serial.println();
// Serial.println(&amp;quot;disconnecting.&amp;quot;);
client.stop();
delay(1500);
if(millis() - lastAttemptTime&amp;gt;requestInterval){
//if youre not connected and two minutes have passed, attempt to connect again
connectToServer();
//try to reconnect here...
}
}
}
void getData(){
voltage = 5 * analogRead(A0) / 1024.0;
//float temp = 5 * analogRead(A1) / 1024.0;
temp=(analogRead(A1))/10;
if(Serial.available()&amp;gt;0){
byte gps=Serial.read(); //echo incoming gps data
Serial.write(gps);
if (dataFile) {
digitalWrite(ledPin, HIGH);//turn on the status led
DateTime now = RTC.now();
dataFile.write(gps);
dataFile.print(now.month());
dataFile.print('/');
dataFile.print(now.day());
dataFile.print('/');
dataFile.print(now.year());
dataFile.print(F(&amp;quot;,&amp;quot;));
dataFile.print(now.hour());
dataFile.print(F(&amp;quot;:&amp;quot;));
dataFile.print(now.minute());
dataFile.print(F(&amp;quot;:&amp;quot;));
dataFile.print(now.second());
dataFile.print(F(&amp;quot;,&amp;quot;));
dataFile.print(voltage);
dataFile.print(F(&amp;quot;,&amp;quot;));
dataFile.print(temp);
dataFile.print(temperature);
dataFile.print(F(&amp;quot;,&amp;quot;));
dataFile.print(pressure);
dataFile.println();
}
dataFile.flush();
}
else{digitalWrite(ledPin, LOW);}
}
void connectToServer(){
// Serial.println(&amp;quot;connecting to server...&amp;quot;);
if (client.connect(server, 80)) {
requested = false;
}
lastAttemptTime = millis();
}
boolean makeRequest() {
// Serial.println(&amp;quot;requesting&amp;quot;);
getData();
// Make a HTTP request:
client.print(&amp;quot;GET /understanding_networks/dataLogger.php?data=&amp;quot;);
client.print(now.month());
client.print('/');
client.print(now.day());
client.print('/');
client.print(now.year());
client.print(F(&amp;quot;,&amp;quot;));
client.print(now.hour());
client.print(F(&amp;quot;:&amp;quot;));
client.print(now.minute());
client.print(F(&amp;quot;:&amp;quot;));
client.print(now.second());
client.print(F(&amp;quot;,&amp;quot;));
client.print(voltage);
client.print(F(&amp;quot;,&amp;quot;));
client.print(temp);
client.print(F(&amp;quot;,&amp;quot;));
client.print(temperature);
client.print(F(&amp;quot;,&amp;quot;));
client.print(pressure);
client.println(&amp;quot; HTTP/1.1 &amp;quot;);
client.println(&amp;quot;HOST: www.levinegabriella.com&amp;quot;);
client.println();
return true;
}
// Calculate temperature given ut.
// Value returned will be in units of 0.1 deg C
short bmp085GetTemperature(unsigned int ut)
{
long x1, x2;
x1 = (((long)ut - (long)ac6)*(long)ac5) &amp;gt;&amp;gt; 15;
x2 = ((long)mc &amp;lt;&amp;lt; 11)/(x1 + md);
b5 = x1 + x2;
return ((b5 + 8)&amp;gt;&amp;gt;4);
}
// Calculate pressure given up
// calibration values must be known
// b5 is also required so bmp085GetTemperature(...) must be called first.
// Value returned will be pressure in units of Pa.
long bmp085GetPressure(unsigned long up)
{
long x1, x2, x3, b3, b6, p;
unsigned long b4, b7;
b6 = b5 - 4000;
// Calculate B3
x1 = (b2 * (b6 * b6)&amp;gt;&amp;gt;12)&amp;gt;&amp;gt;11;
x2 = (ac2 * b6)&amp;gt;&amp;gt;11;
x3 = x1 + x2;
b3 = (((((long)ac1)*4 + x3)&amp;lt;&amp;lt;OSS) + 2)&amp;gt;&amp;gt;2;
// Calculate B4
x1 = (ac3 * b6)&amp;gt;&amp;gt;13;
x2 = (b1 * ((b6 * b6)&amp;gt;&amp;gt;12))&amp;gt;&amp;gt;16;
x3 = ((x1 + x2) + 2)&amp;gt;&amp;gt;2;
b4 = (ac4 * (unsigned long)(x3 + 32768))&amp;gt;&amp;gt;15;
b7 = ((unsigned long)(up - b3) * (50000&amp;gt;&amp;gt;OSS));
if (b7 &amp;lt; 0x80000000)
p = (b7&amp;lt;&amp;lt;1)/b4;
else
p = (b7/b4)&amp;lt;&amp;lt;1;
x1 = (p&amp;gt;&amp;gt;8) * (p&amp;gt;&amp;gt;8);
x1 = (x1 * 3038)&amp;gt;&amp;gt;16;
x2 = (-7357 * p)&amp;gt;&amp;gt;16;
p += (x1 + x2 + 3791)&amp;gt;&amp;gt;4;
return p;
}
// Read 1 byte from the BMP085 at 'address'
char bmp085Read(unsigned char address)
{
unsigned char data;
Wire.beginTransmission(BMP085_ADDRESS);
Wire.write(address);
Wire.endTransmission();
Wire.requestFrom(BMP085_ADDRESS, 1);
while(!Wire.available())
;
return Wire.read();
}
// Read 2 bytes from the BMP085
// First byte will be from 'address'
// Second byte will be from 'address'+1
int bmp085ReadInt(unsigned char address)
{
unsigned char msb, lsb;
Wire.beginTransmission(BMP085_ADDRESS);
Wire.write(address);
Wire.endTransmission();
Wire.requestFrom(BMP085_ADDRESS, 2);
while(Wire.available()&amp;lt;2)
;
msb = Wire.read();
lsb = Wire.read();
return (int) msb&amp;lt;&amp;lt;8 | lsb;
}
// Read the uncompensated temperature value
unsigned int bmp085ReadUT()
{
unsigned int ut;
// Write 0x2E into Register 0xF4
// This requests a temperature reading
Wire.beginTransmission(BMP085_ADDRESS);
Wire.write(0xF4);
Wire.write(0x2E);
Wire.endTransmission();
// Wait at least 4.5ms
delay(5);
// Read two bytes from registers 0xF6 and 0xF7
ut = bmp085ReadInt(0xF6);
return ut;
}
// Read the uncompensated pressure value
unsigned long bmp085ReadUP()
{
unsigned char msb, lsb, xlsb;
unsigned long up = 0;
// Write 0x34+(OSS&amp;lt;&amp;lt;6) into register 0xF4
// Request a pressure reading w/ oversampling setting
Wire.beginTransmission(BMP085_ADDRESS);
Wire.write(0xF4);
Wire.write(0x34 + (OSS&amp;lt;&amp;lt;6));
Wire.endTransmission();
// Wait for conversion, delay time dependent on OSS
delay(2 + (3&amp;lt;&amp;lt;OSS));
// Read register 0xF6 (MSB), 0xF7 (LSB), and 0xF8 (XLSB)
Wire.beginTransmission(BMP085_ADDRESS);
Wire.write(0xF6);
Wire.endTransmission();
Wire.requestFrom(BMP085_ADDRESS, 3);
// Wait for data to become available
while(Wire.available() &amp;lt; 3)
;
msb = Wire.read();
lsb = Wire.read();
xlsb = Wire.read();
up = (((unsigned long) msb &amp;lt;&amp;lt; 16) | ((unsigned long) lsb &amp;lt;&amp;lt; 8) | (unsigned long) xlsb) &amp;gt;&amp;gt; (8-OSS);
return up;
}
void blink(int thisPin, int howManyTimes){
for (int blinks = 0;blinks&amp;lt;howManyTimes;blinks++){
digitalWrite(thisPin, HIGH);
delay(200);
digitalWrite(thisPin, LOW);
delay(200);
}
}
//questions: what other sensors will be good?
//what is too much data
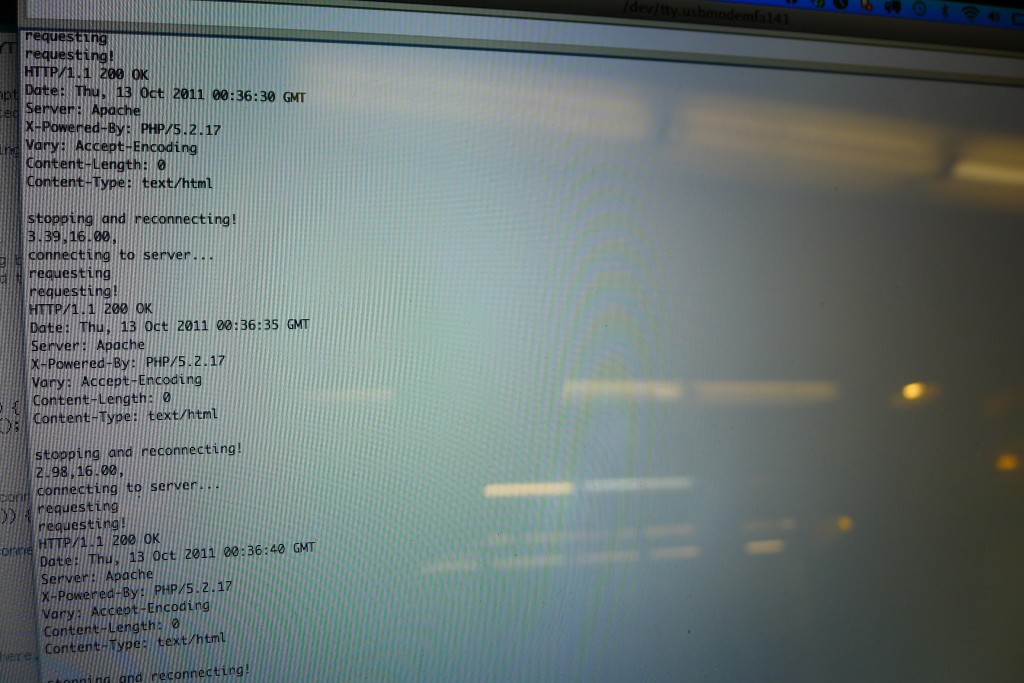
//i seem to be making my request twice
//when my request interval is more than 5000 i get
//10/13/2011,11:14:56,3.67,15.00
//10/13/2011,11:15:5,3.65,15.00
//10/13/2011,11:15:16,0.00,0.00
//10/13/2011,11:15:44,0.00,0.00
//why
//can you go back a directory
//try it? overwhelm maybe... w/ gps
//implem. timer
</code>
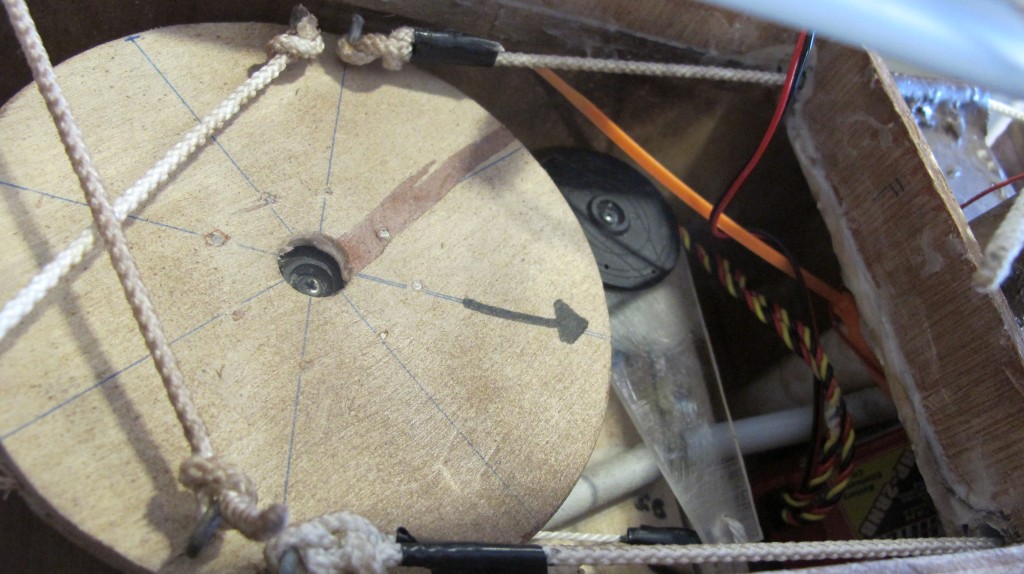
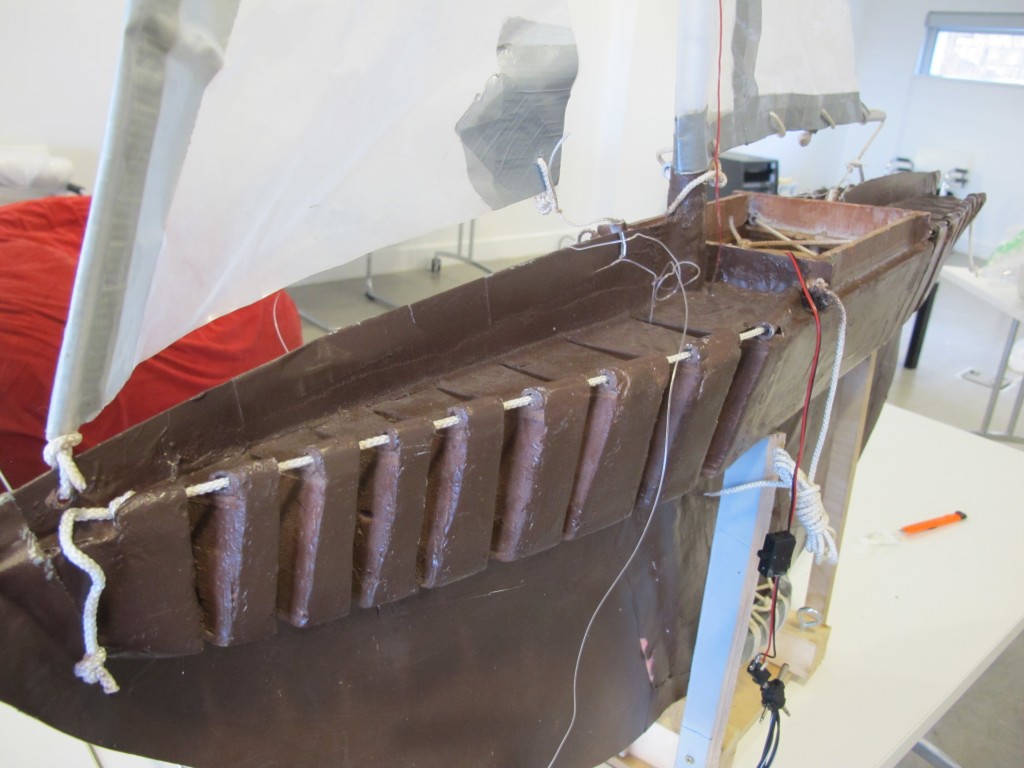
robot boat with many sensing capabilities


STEP BY STEP HOW TO:
http://levinegabriella.com/teaching/Boat.pdf TUTORIAL and CODE
github.com/gabriella/boat-


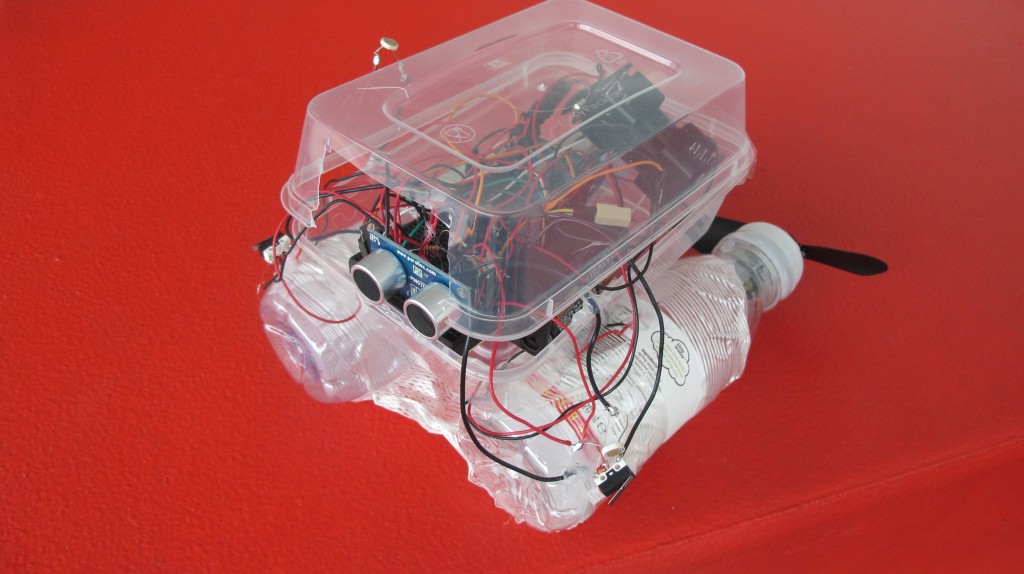


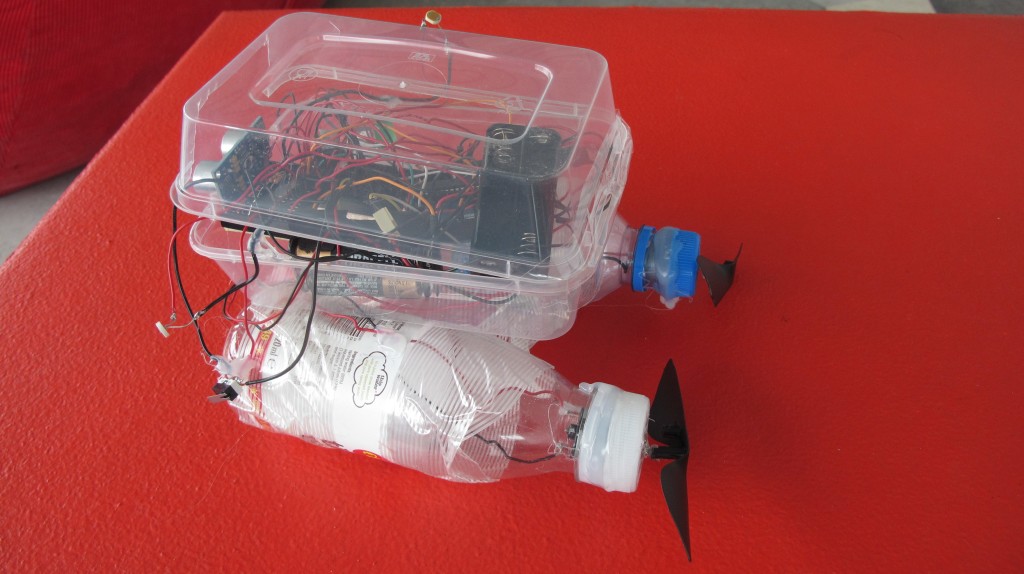
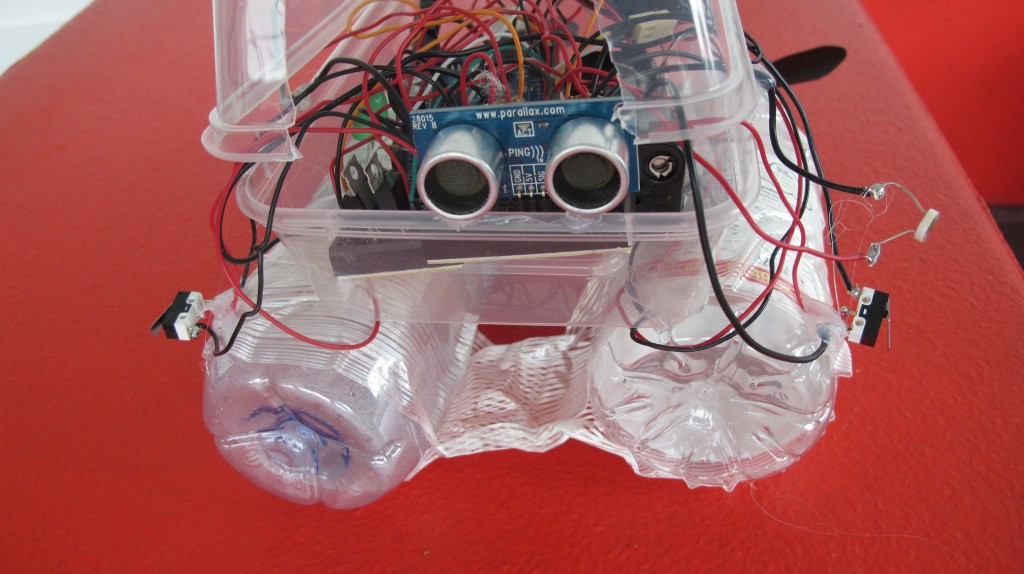


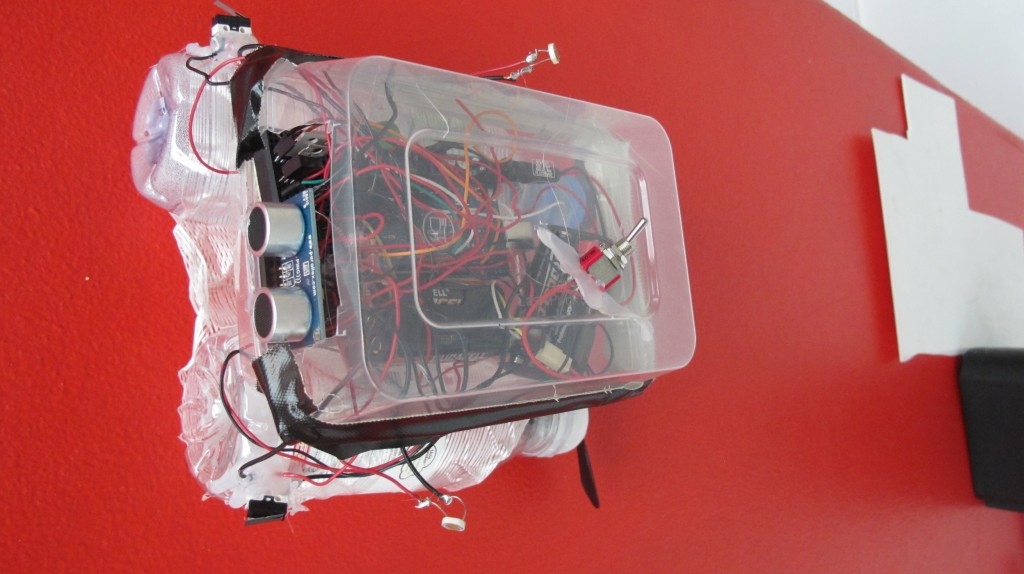

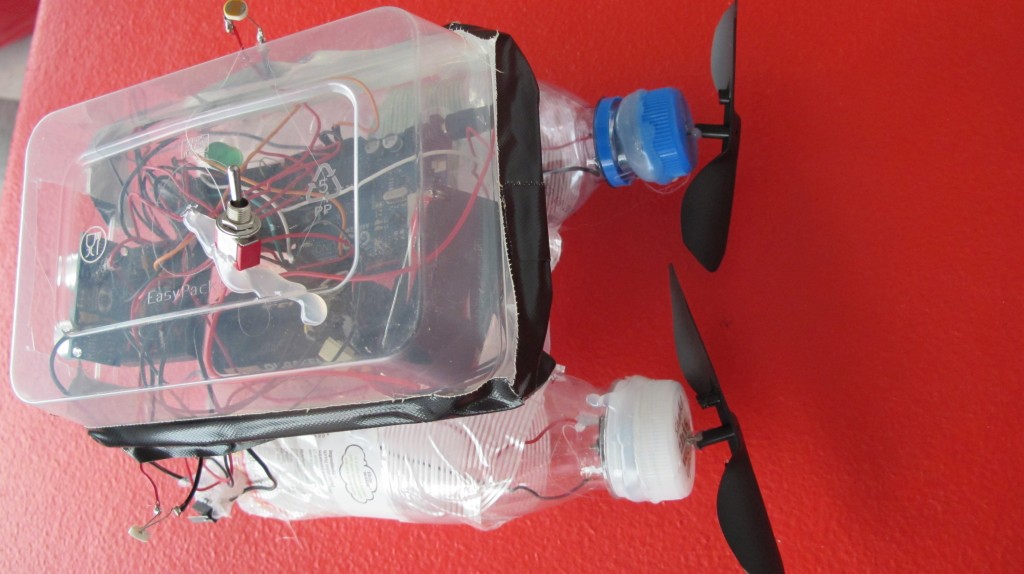
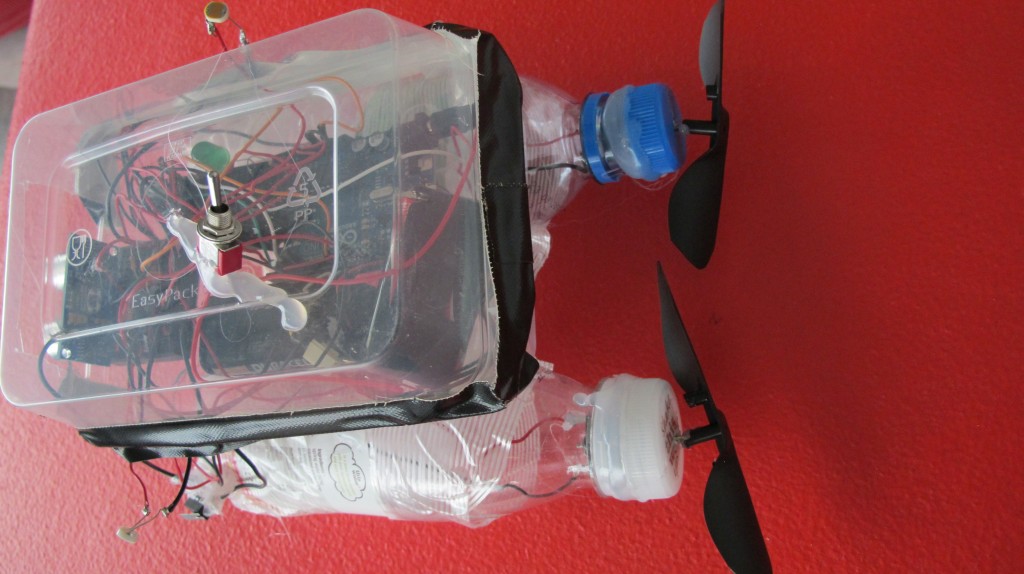
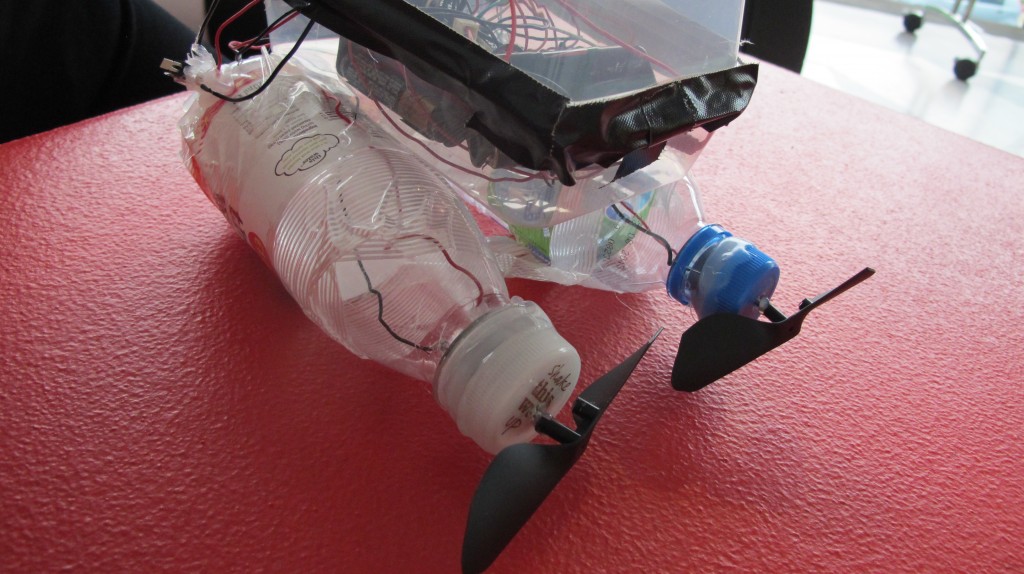
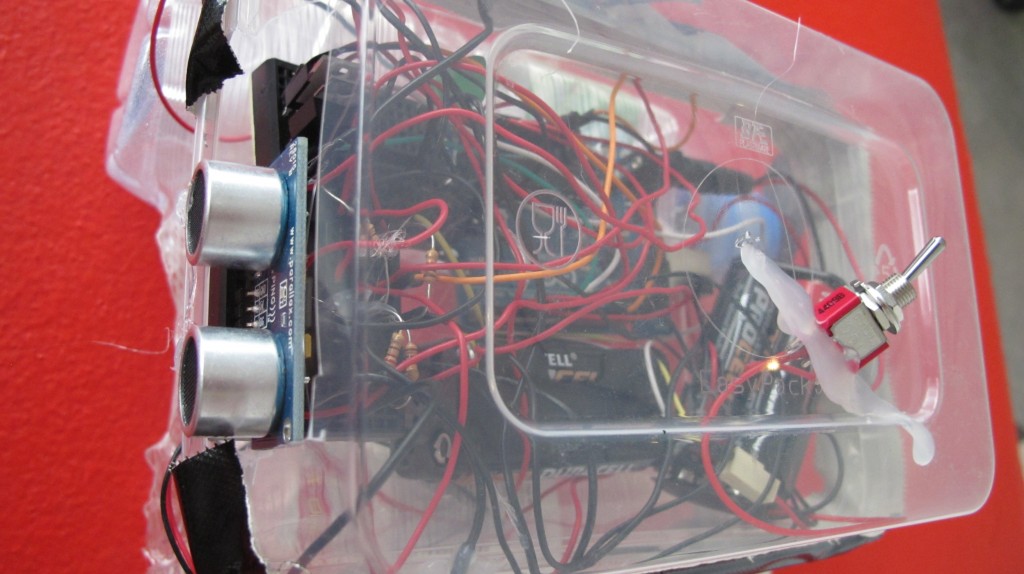
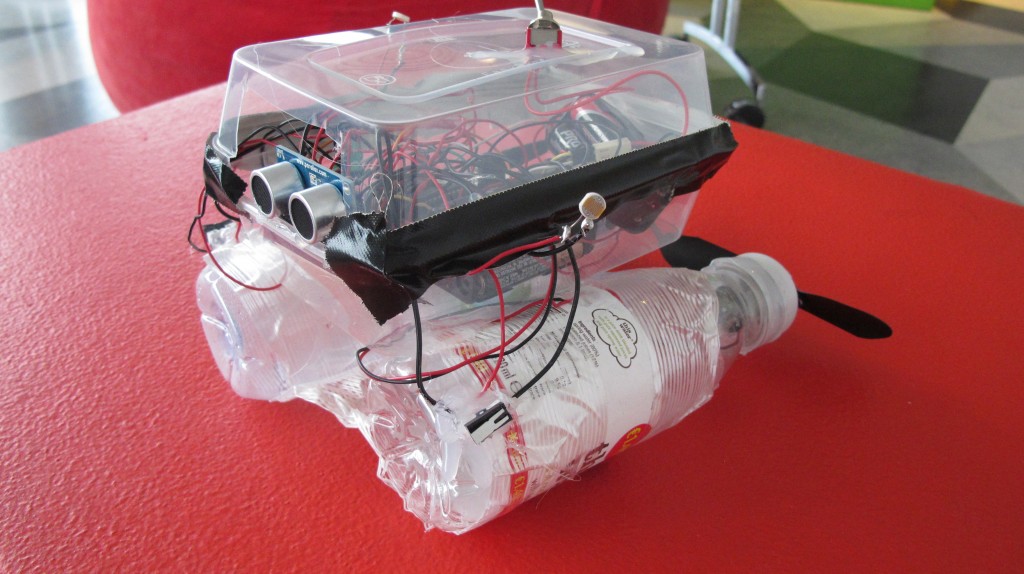
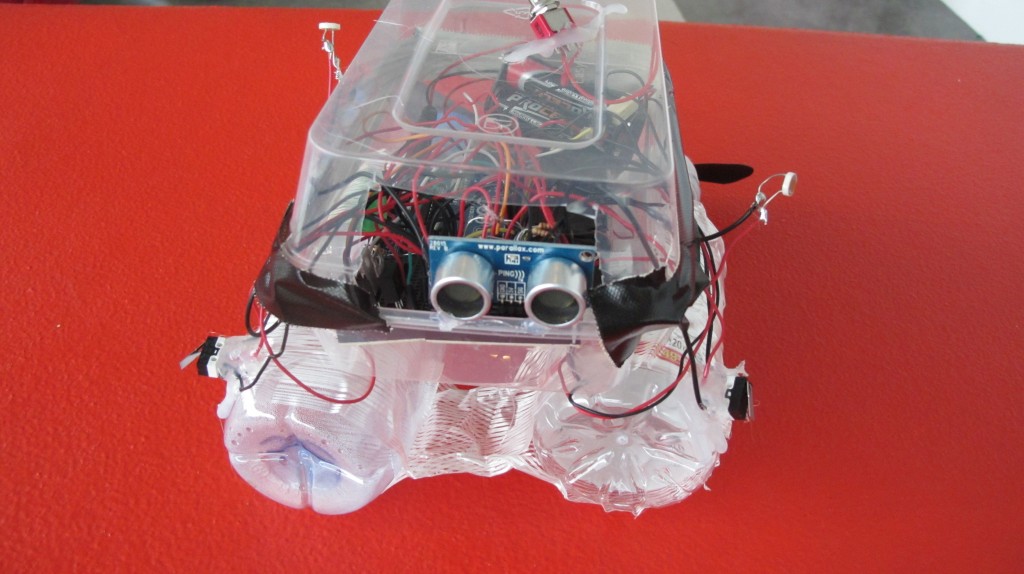
Mini Protei
more to come – just a few photos – thanks to the action shots by Jason Stevens (thanks!)


















Logging data remotely to the web, no computer
So I switched over the client to here: http://levinegabriella.com/understanding_networks/liveApplet/

(I have to figure out why no text is appearing on the graph – i had temperature and light and date markers)
the php server is written here: http://levinegabriella.com/understanding_networks/dataLogger.php
The server reads and writes to a text file here: http://www.levinegabriella.com/understanding_networks/liveApplet/DATAcl.TXT
See code below for Arduino and php and processing
Next step: The day I left NY my dataLogging Arduino “crashed”, after working for a week . It could have been any number of things. The SD card, the server, a short?
Try Pachube, and Watch Dog to restart Arduino if it crashes.
Can i do some virtual debugging?
Also, Arduino UNO ran out of space (the functions include: data logger, ethernet connection to a server, temp sensor, light sensor, real time clock – But there are many more sensors on board (gps, humidity, accelerometer, barometric pressure) so I’ve moved everything over to the MEGA. Had to rearrange the SPI / I2C pin connections, but besides that it’s all good.
(all the code (php, processing, arduino) can also be downloaded here)
More to come…

&amp;amp;amp;lt;?php
// put the name and path of the text file in a variable.
// this is the text file where we'll store the data:
$filename = 'liveApplet/DATAcl.TXT';
//make sure the file is not empty:
if (file_exists($filename)) {
// get the contents of the file
// and put them in a variable called $fileContents:
$fileContents = file_get_contents($filename);
// if there is new data from the client, it'll
// be in a request parameter called &amp;amp;amp;quot;data&amp;amp;amp;quot;.
if (isset($_REQUEST['data'])) {
// append what the client sent as 'data' to
// the variable holding the file contents:
$fileContents = $fileContents . &amp;amp;amp;quot;\n&amp;amp;amp;quot;. $_REQUEST['data'];
// put the file contents back into the file
// you're overwriting the whole file when you do this:
file_put_contents($filename, $fileContents);
} else {
// there was no data sent in the request
// so show the old stuff:
// echo '&amp;amp;amp;lt;p&amp;amp;amp;gt;' . $fileContents . '&amp;amp;amp;lt;/p&amp;amp;amp;gt;';
//split the string of the newLines:
$strings = explode(&amp;amp;amp;quot;\n&amp;amp;amp;quot;, $fileContents);
//loop over the array of the lines, adding a break at the end of each
foreach ($strings as $thisString){
echo $thisString . &amp;amp;amp;quot;&amp;amp;amp;lt;br/&amp;amp;amp;gt;\n&amp;amp;amp;quot;;
}
}
}
?&amp;amp;amp;gt;
Arduino:
[/python]
/*
Web client
This sketch connects to a website (http://www.google.com)
using an Arduino Wiznet Ethernet shield.
Circuit:
* Ethernet shield attached to pins 10, 11, 12, 13
created 18 Dec 2009
by David A. Mellis
*/
#include
#include
#include
#include “RTClib.h”
#include
// Enter a MAC address for your controller below.
// Newer Ethernet shields have a MAC address printed on a sticker on the shield
byte mac[] = {
0x00, 0xAA, 0xBB, 0xCC, 0xDE, 0x03 };
IPAddress server(69,89,31,63); // my IP server
const int requestInterval = 30000;
long lastAttemptTime = 0; // last time you connected to the server, in milliseconds
boolean requested;
const int resetLED = 13;
float temp;
float voltage;
// Initialize the Ethernet client library
// with the IP address and port of the server
// that you want to connect to (port 80 is default for HTTP):
const int chipSelect = 4;//changed from 8
const int LOCATION_FILE_NUMBER_LSB = 0x00;
const int LOCATION_FILE_NUMBER_MSB = 0x01;
File dataFile;
RTC_DS1307 RTC;
EthernetClient client;
DateTime now;
void setup() {
// start the serial library:
Serial.begin(9600);
pinMode(A2, OUTPUT);
pinMode(A3, OUTPUT);
// A2 is the ground, A3 is the power:
digitalWrite(A2, LOW);
digitalWrite(A3, HIGH);
pinMode(10, OUTPUT);
if (!SD.begin(chipSelect)) {
Serial.println(“Card failed, or not present”);
// don’t do anything more:
}
Serial.println(“card initialized.”);
Wire.begin();
RTC.begin();
delay(50);
if (! RTC.isrunning()) {
Serial.println(“RTC is NOT running!”);
// following line sets the RTC to the date & time this sketch was compiled
RTC.adjust(DateTime(__DATE__, __TIME__));
}
dataFile = SD.open(“data.txt”, FILE_WRITE);
delay(500);
// start the Ethernet connection:
Ethernet.begin(mac);
if (Ethernet.begin(mac) == 0) {
Serial.println(“Failed to configure Ethernet using DHCP”);
// no point in carrying on, so do nothing forevermore:
for(;;)
;
}
// connectToServer();
// give the Ethernet shield a second to initialize:
delay(1500);
blink(resetLED, 3);
Serial.println(“connecting…”);
connectToServer();
}
void loop()
{
now = RTC.now();
if(client.connected()){
if(!requested){
requested = makeRequest();
// Serial.println(“requesting!”);
}
if(millis() – lastAttemptTime>requestInterval){
//if youre not connected and two minutes have passed, attempt to connect again
client.stop();
// Serial.println(“stopping and reconnecting!”);
// getData();
delay(1500);
//connectToServer();
}
// if there are incoming bytes available
// from the server, read them and print them:
}
if (client.available()) {
char c = client.read();
// Serial.print(c);
}
// if the server’s disconnected, stop the client:
if (!client.connected()) {
// Serial.println();
// Serial.println(“disconnecting.”);
client.stop();
delay(1500);
if(millis() – lastAttemptTime>requestInterval){
//if youre not connected and two minutes have passed, attempt to connect again
connectToServer();
//try to reconnect here…
}
}
}
void getData(){
voltage = 5 * analogRead(A0) / 1024.0;
//float temp = 5 * analogRead(A1) / 1024.0;
temp=(analogRead(A1))/10;
// Serial.print(voltage);
// Serial.print(F(“,”));
// Serial.print(temp);
// Serial.print(F(“,”));
// Serial.println(” “);
//
if (dataFile) {
DateTime now = RTC.now();
dataFile.print(now.month());
dataFile.print(‘/’);
dataFile.print(now.day());
dataFile.print(‘/’);
dataFile.print(now.year());
dataFile.print(F(“,”));
dataFile.print(now.hour());
dataFile.print(F(“:”));
dataFile.print(now.minute());
dataFile.print(F(“:”));
dataFile.print(now.second());
dataFile.print(F(“,”));
dataFile.print(voltage);
dataFile.print(F(“,”));
dataFile.print(temp);
dataFile.println();
}
dataFile.flush();
}
void connectToServer(){
// Serial.println(“connecting to server…”);
if (client.connect(server, 80)) {
requested = false;
}
lastAttemptTime = millis();
}
boolean makeRequest() {
// Serial.println(“requesting”);
getData();
// Make a HTTP request:
client.print(“GET /understanding_networks/dataLogger.php?data=”);
client.print(now.month());
client.print(‘/’);
client.print(now.day());
client.print(‘/’);
client.print(now.year());
client.print(F(“,”));
client.print(now.hour());
client.print(F(“:”));
client.print(now.minute());
client.print(F(“:”));
client.print(now.second());
client.print(F(“,”));
client.print(voltage);
client.print(F(“,”));
client.print(temp);
client.println(” HTTP/1.1 “);
client.println(“HOST: www.levinegabriella.com”);
client.println();
return true;
}
void blink(int thisPin, int howManyTimes){
for (int blinks = 0;blinks digitalWrite(thisPin, HIGH);
delay(200);
digitalWrite(thisPin, LOW);
delay(200);
}
}
//questions: what other sensors will be good?
//what is too much data
//i seem to be making my request twice
//when my request interval is more than 5000 i get
//10/13/2011,11:14:56,3.67,15.00
//10/13/2011,11:15:5,3.65,15.00
//10/13/2011,11:15:16,0.00,0.00
//10/13/2011,11:15:44,0.00,0.00
//why
//can you go back a directory
[/python]
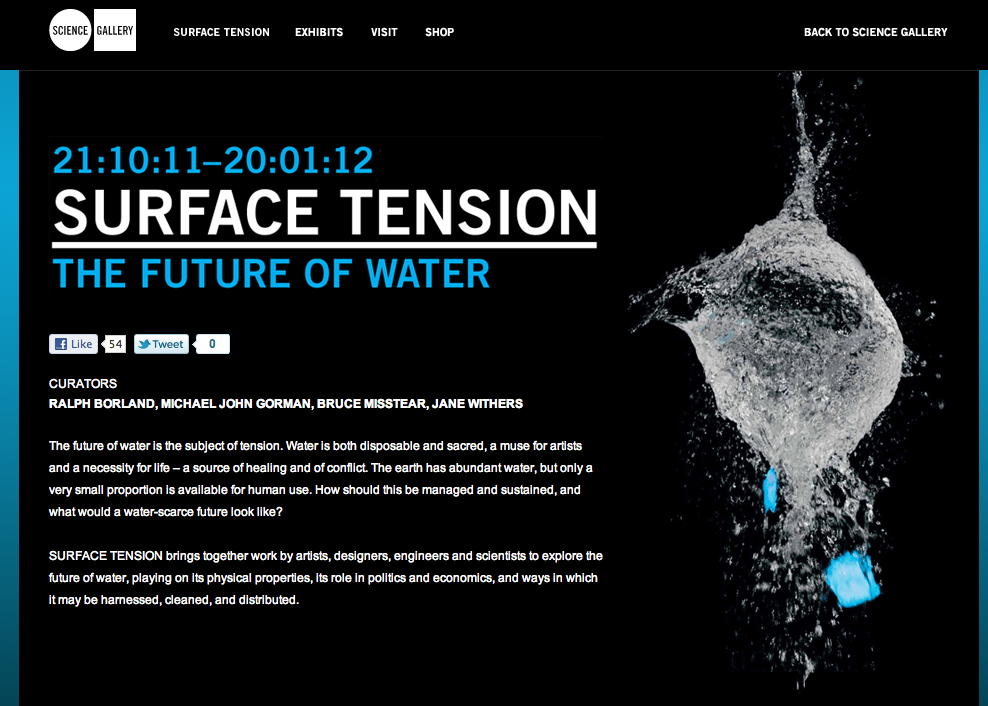
SURFACE TENSION – the Future of Water – at The Science Gallery, Dublin
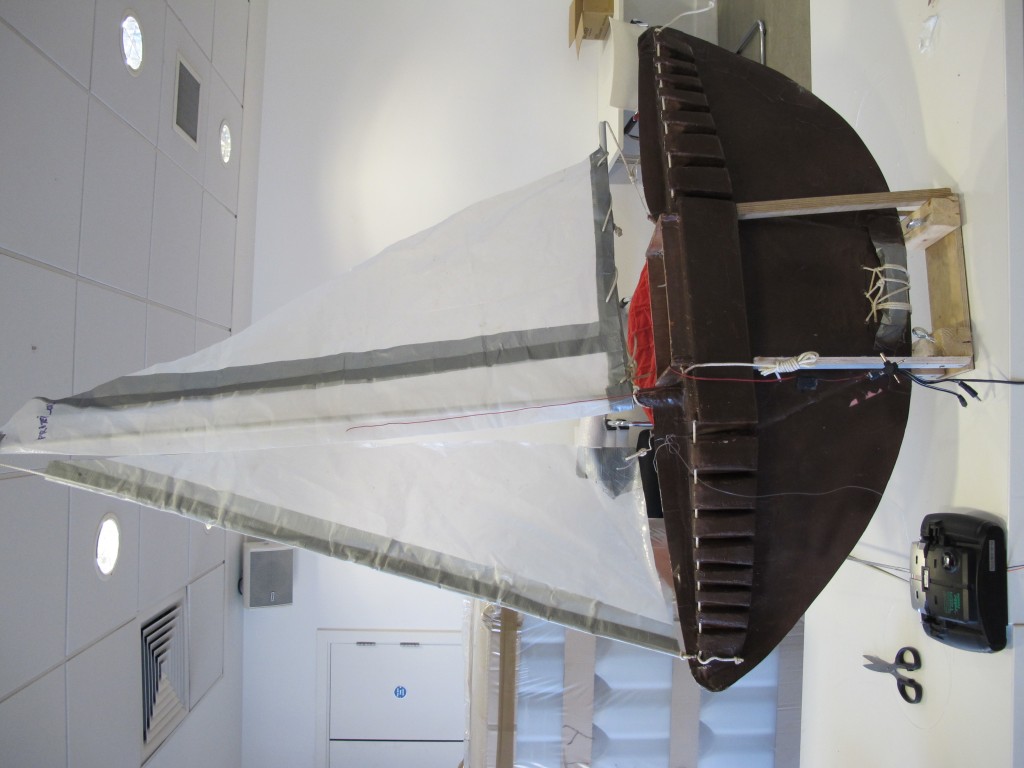
Protei_002 at the Science Gallery
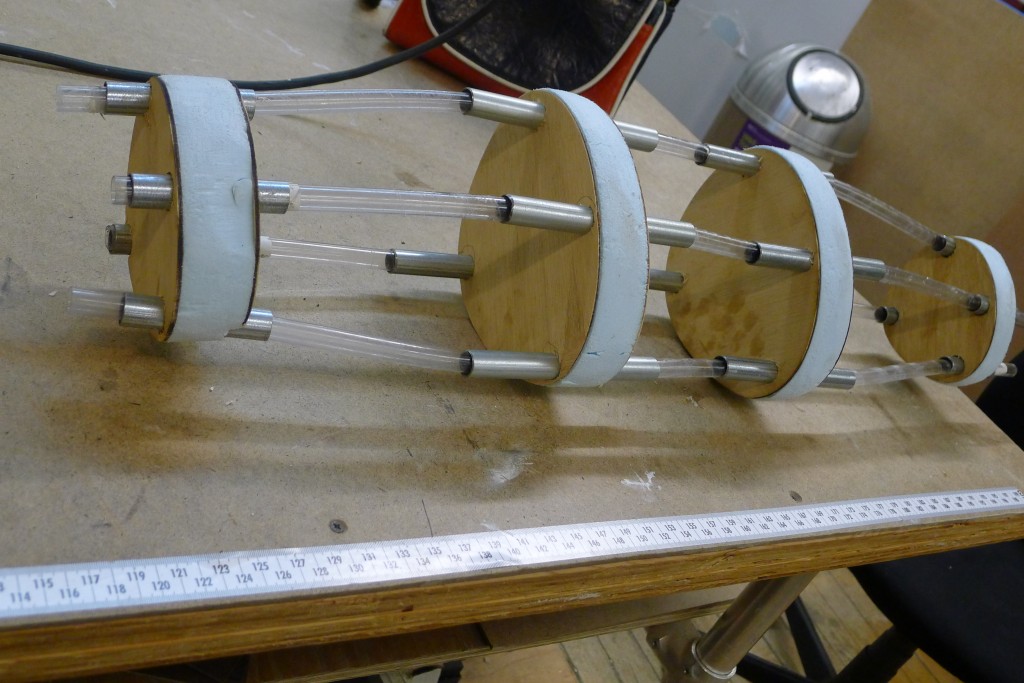
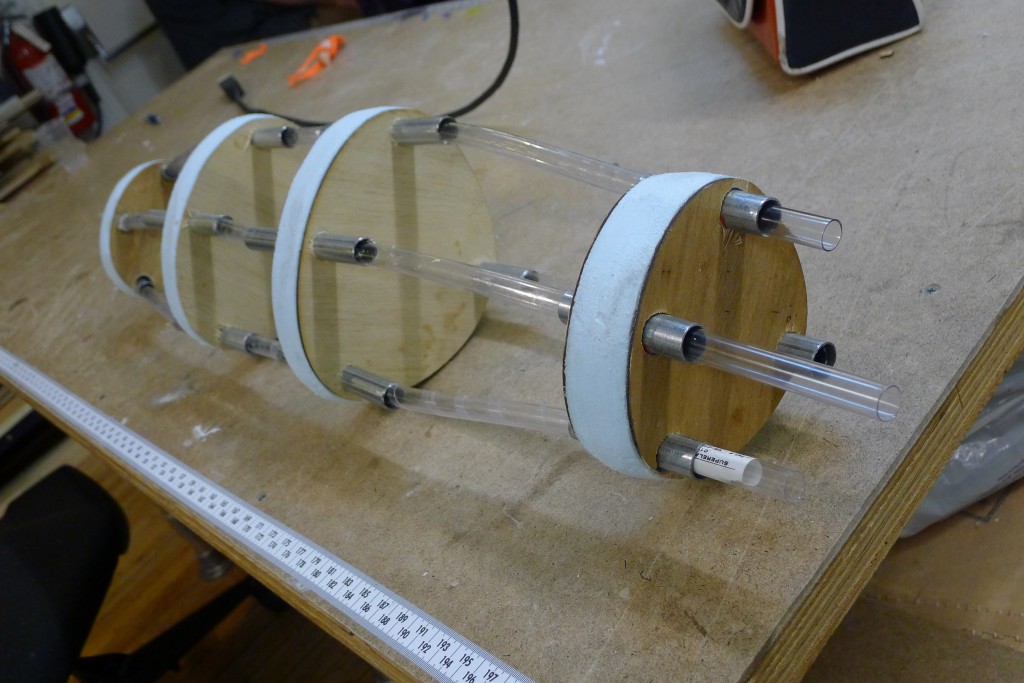
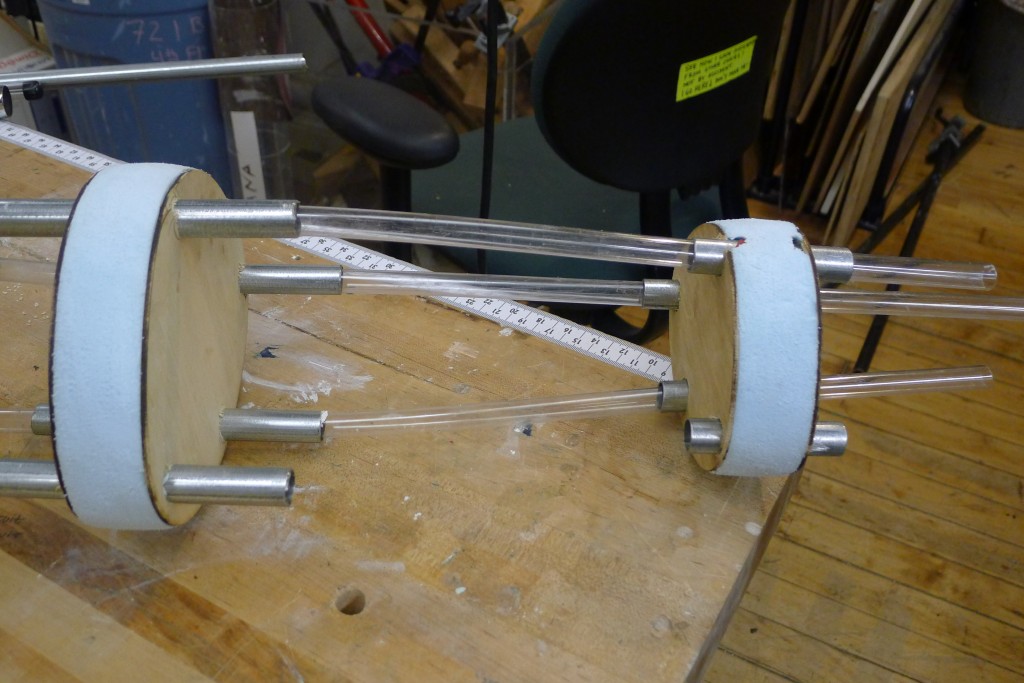
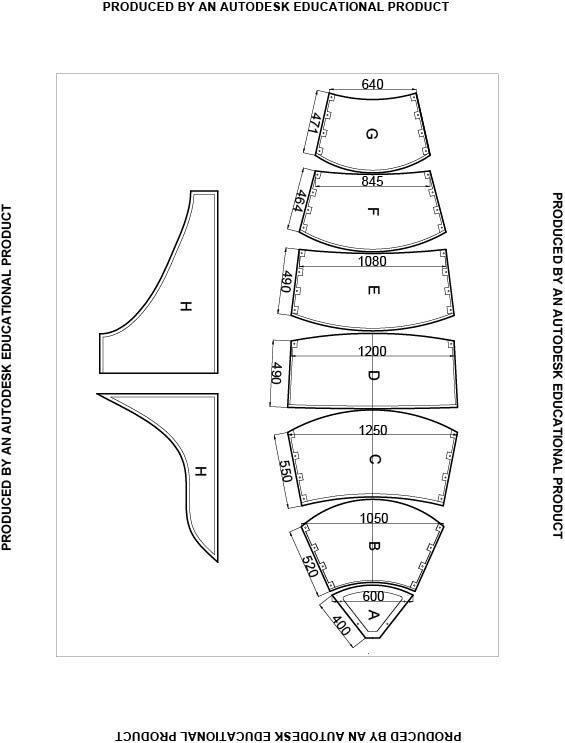
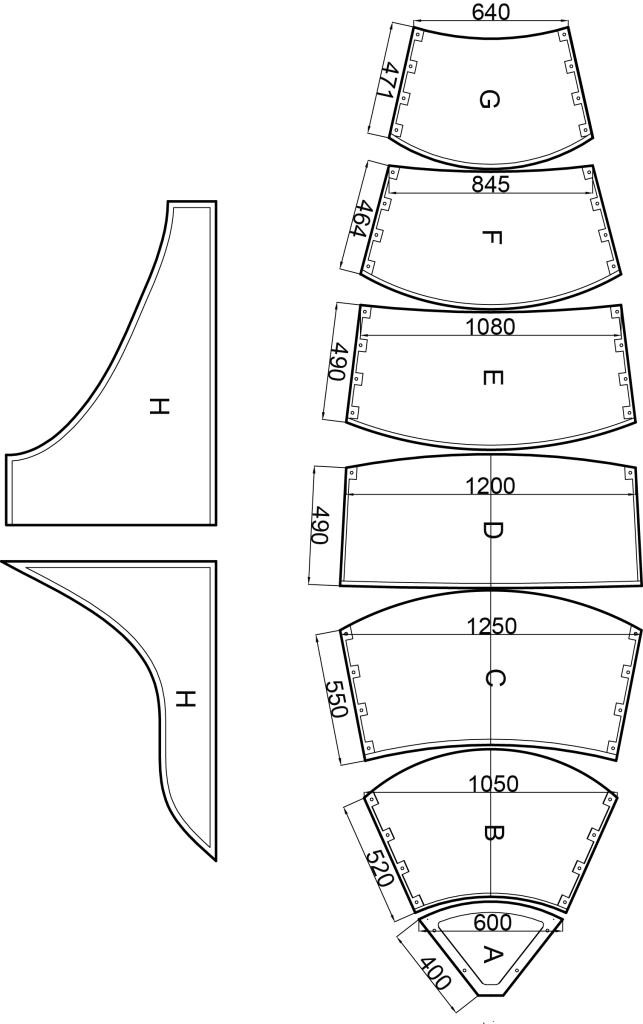
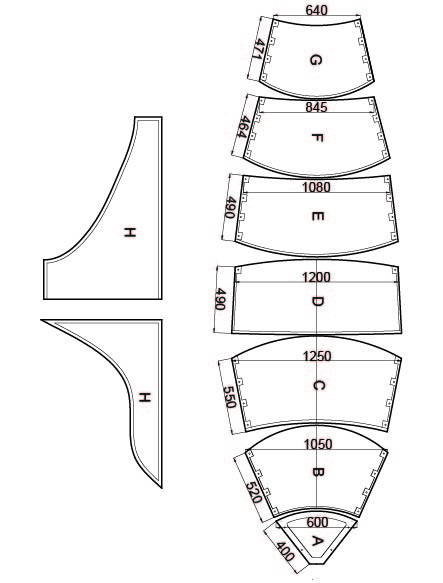
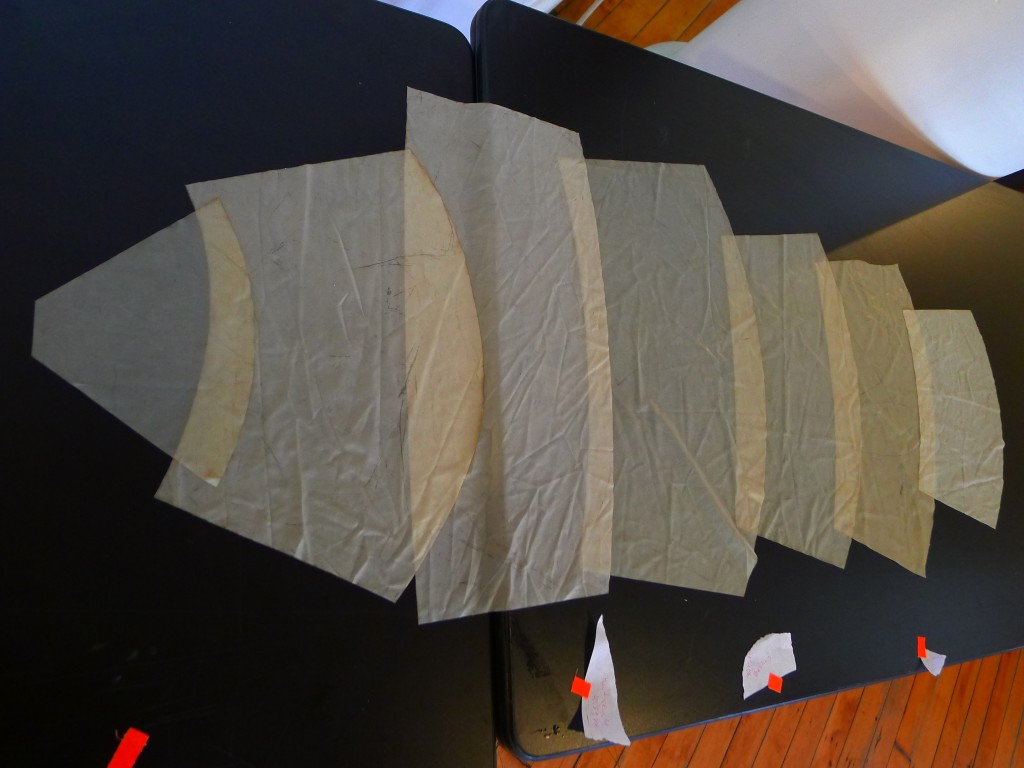
PROTEI_002
PROTEI
Oil spills destroy wildlife, human health, and have serious effects on the economy. Despite billions of dollars being invested into new technologies for the management of oil spills, they are still incredibly difficult to contain and treat. Oil from a spill drifts downwind, following surface currents. One technique to manage this drift is to use skimmers – repurposed fishing boats that contain and absorb the oil. Despite being mobilised in their hundreds, skimmers absorb a relatively small proportion of oil from a spill. Protei have come up with a way to optimise the process using existing technology and an innovative open source design. Protei_002 is a prototype for a fleet of low-cost, articulated, DIY, semi- autonomous oil-collecting sailboats. The full-sized boat pulls a sorbent boom, which absorbs oil off the top of water near spill sites. It is the first sailboat that can catch winds from both sides and can therefore sail upwind and intercept the oil sheens as they travel downwind. It can be controlled remotely and so does not endanger the health of operators. It can travel long distances from shore, work continuously during the day or night, and is much cheaper than existing skimming technologies. It is open source, making it possible for individuals to tailor the design to different functions, and to collaborate on its development.
Here I am setting up Protei_002 for this amazing exhibition
And come learn to build robotic boats Saturday.
Here are some of the other works featured in the exhibit.



Protei at Open_hardware summit 2011
This was the most inspiring day for me.










nice write up on the science american blog







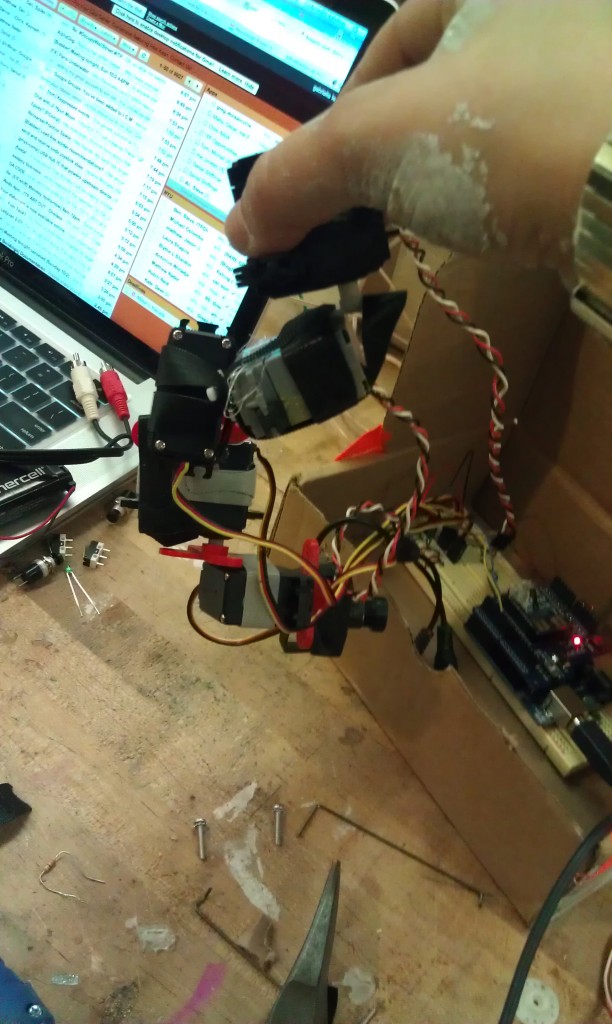
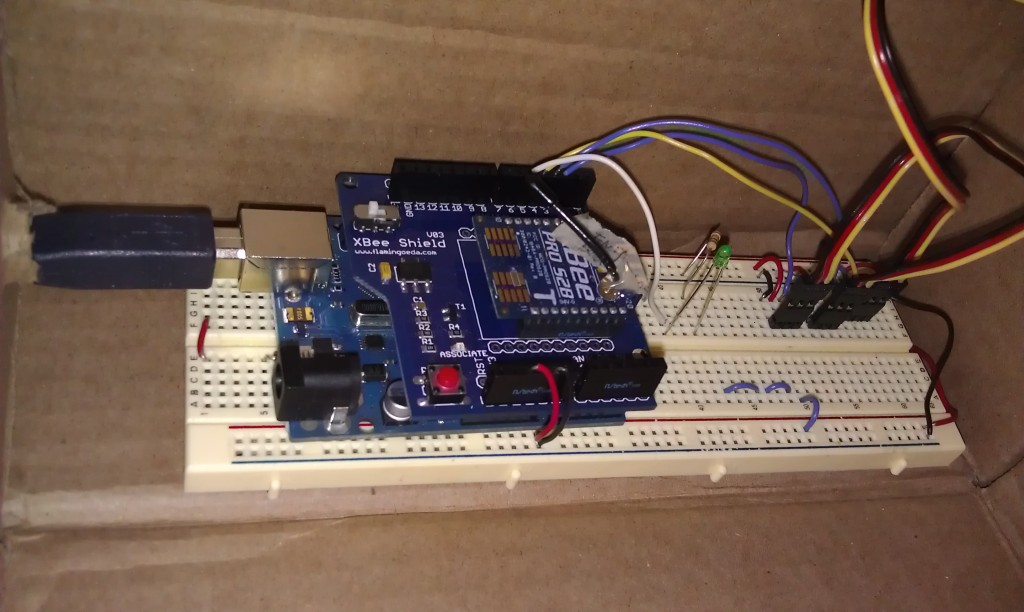
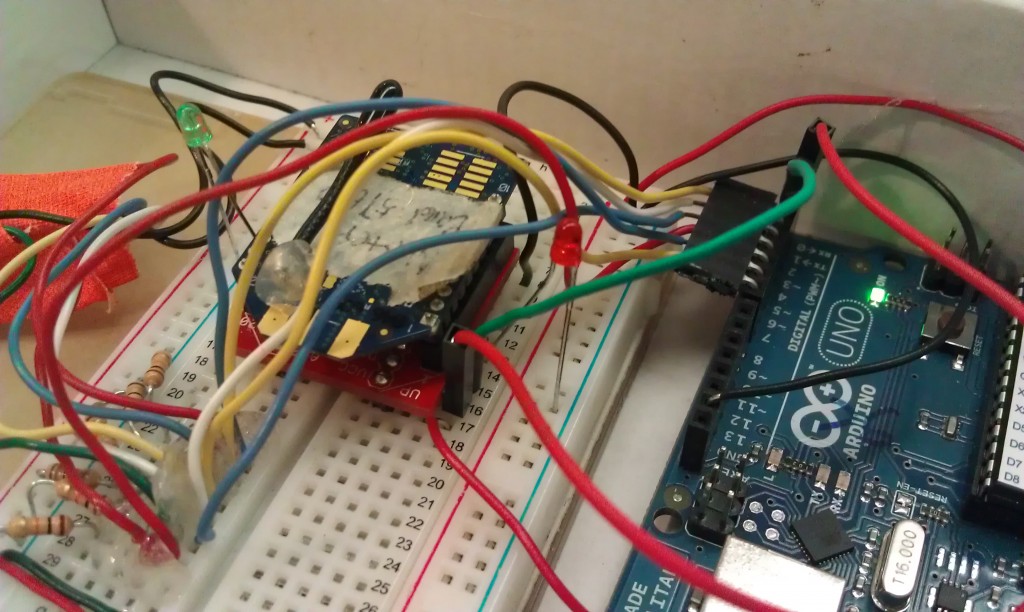
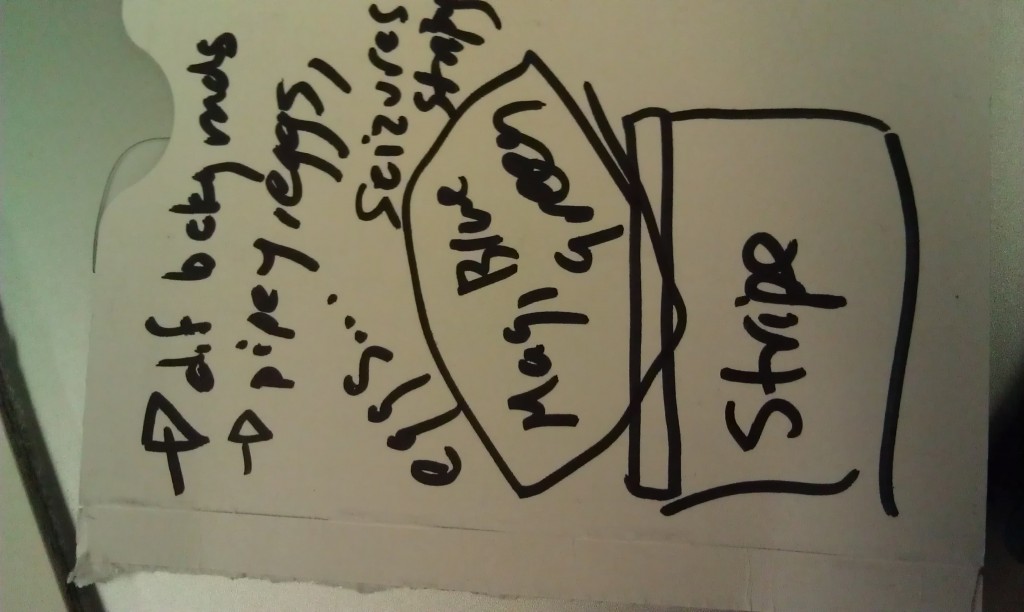
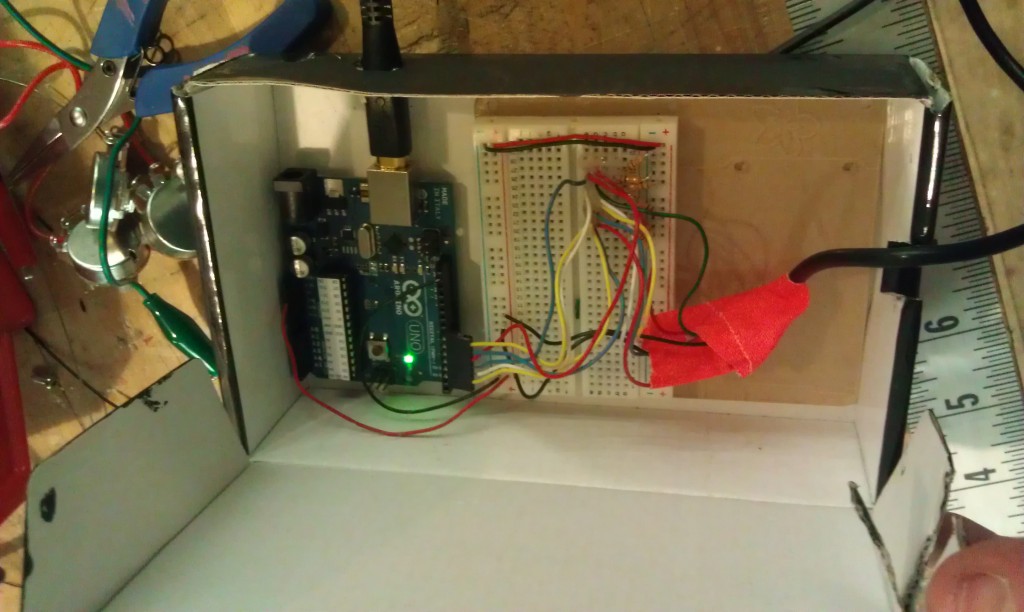
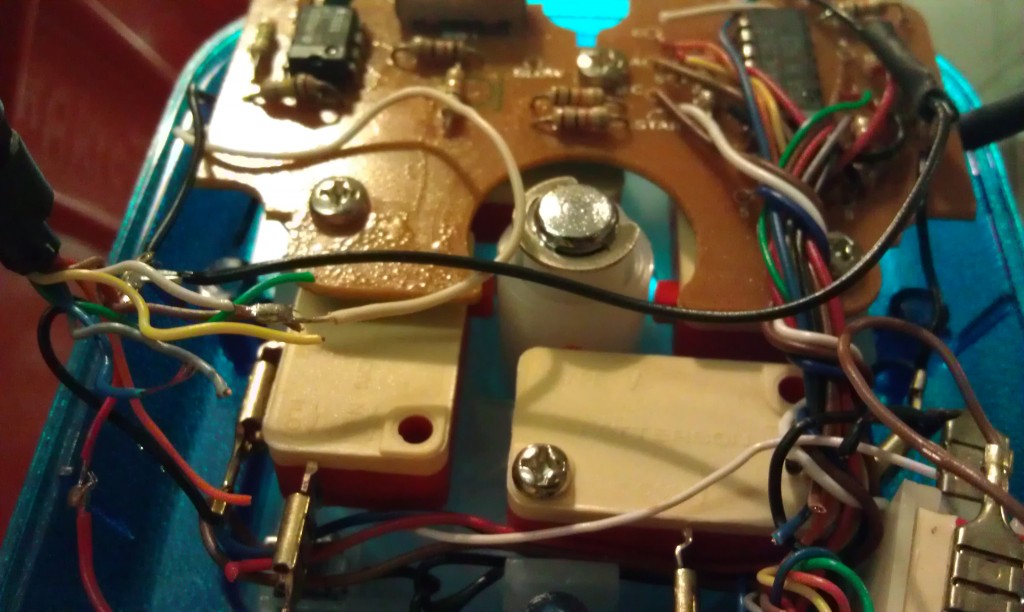
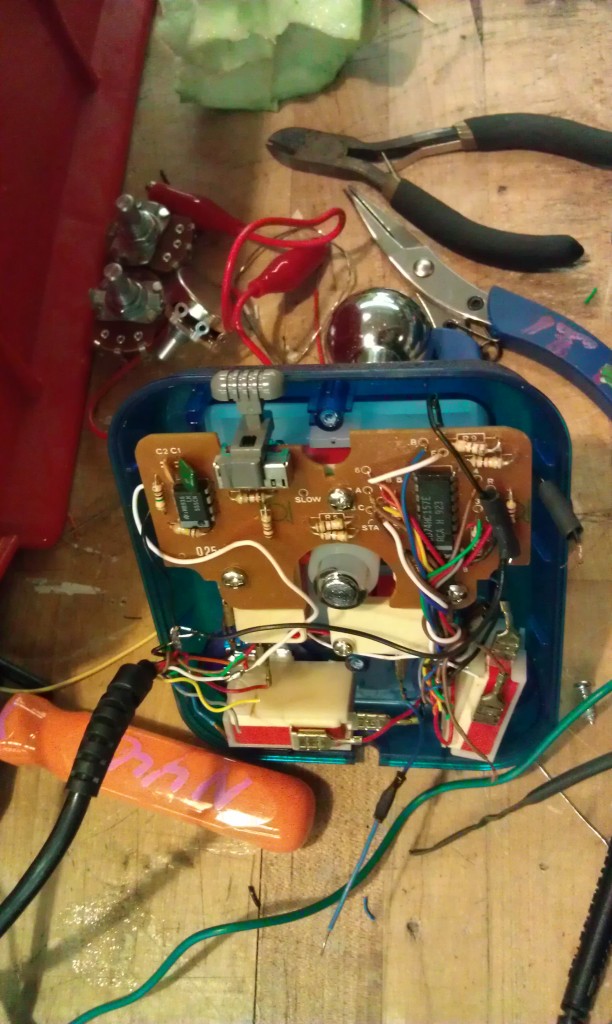
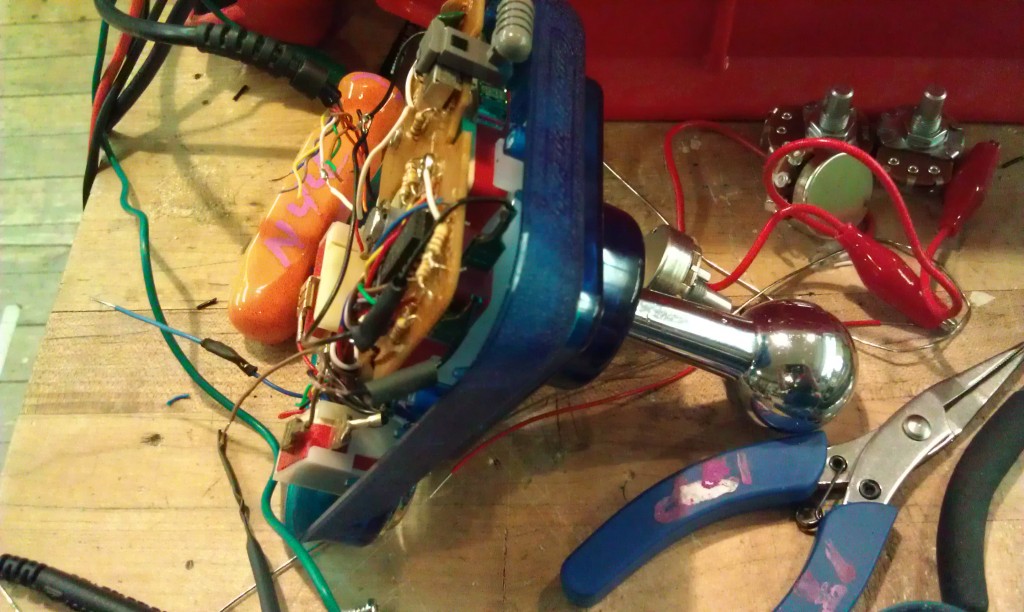
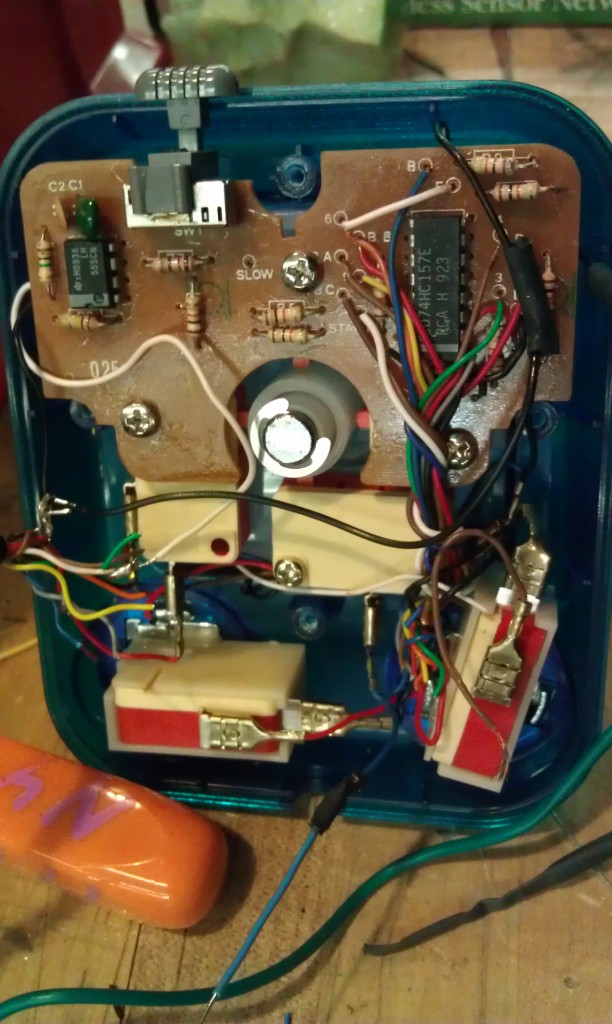
A wireless robotic locomotive doorbell surveillance camera
unfinished…
I started making a wireless doorbell that would make a phone ring
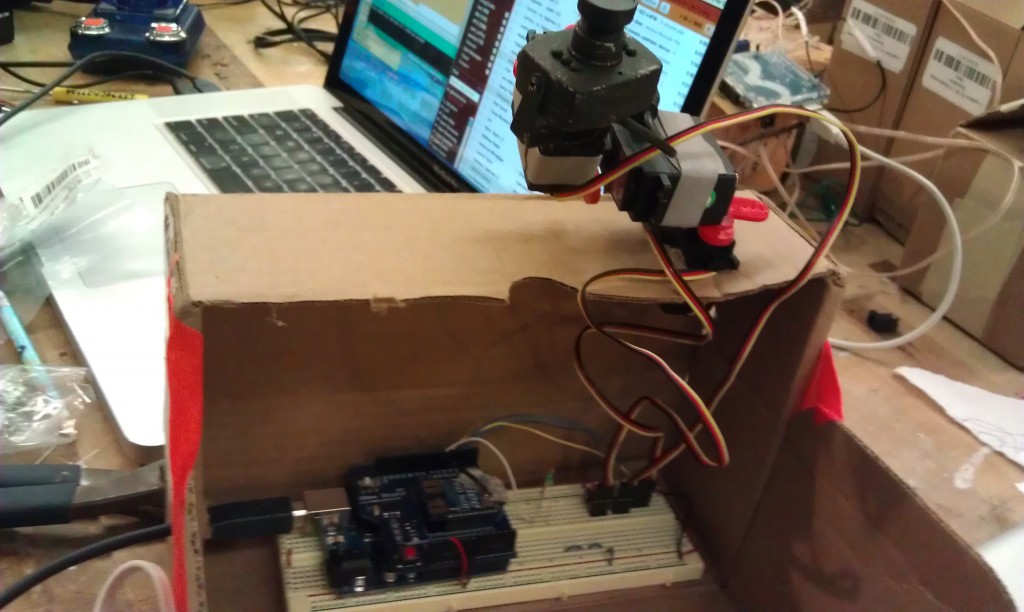
Perhaps the phone no longer requires 20 Hz at 48 to 90 volts AC because it doesn’t have those vintage brass bells but rather a buzzer with a piezo, but I couldn’t figure out how to get the right waveform – then the phone went missing. so… my doorbell is a number of layered moving servos activated by a joystick. There is a wireless camera attached to the top which plays back on a screen (or a computer if I go through a little unit (from GrassValley I have).

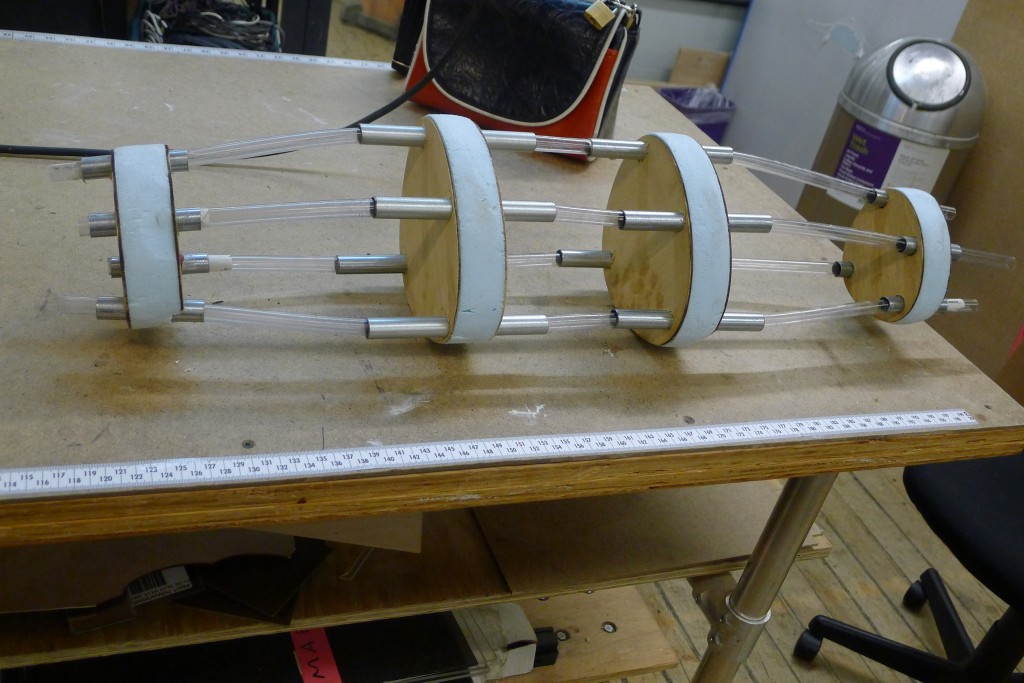
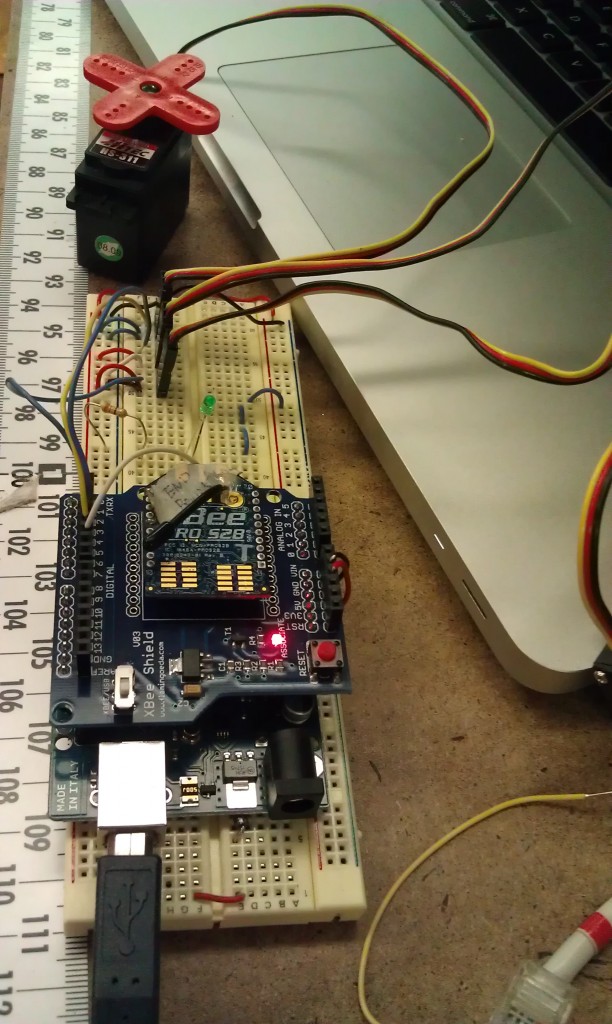
Jerky camera robot arm prototype:
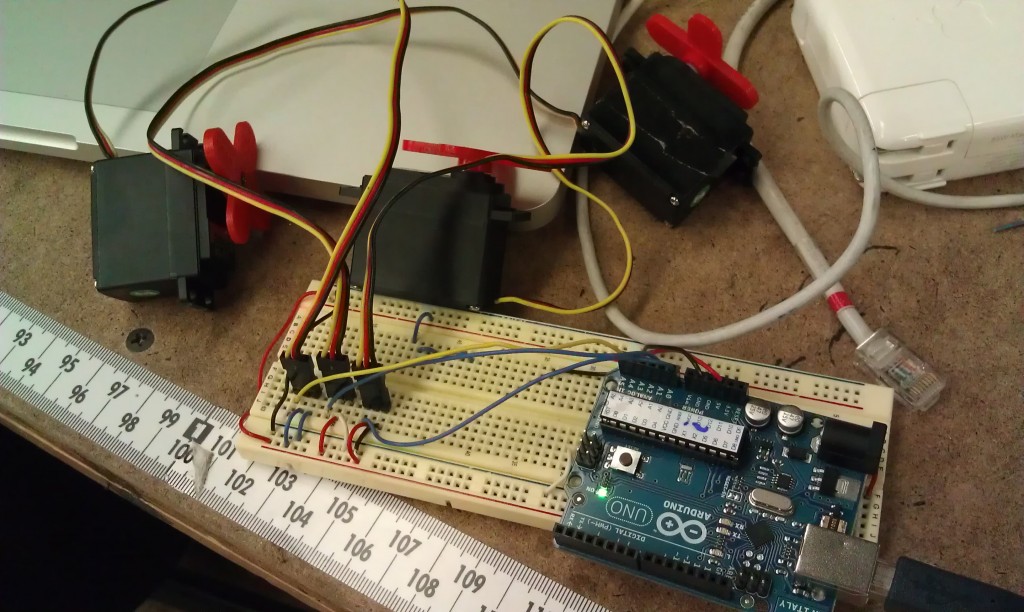
Camera mounted:
Testing the servos:
Wirelessly controlling three servos with my joystick:
I used a joystick that I had previously hacked into, for the networked PONG game that is in the hall of ITP.



Here are some photos from the process:














How to get data on the internet without a computer
I did this using the Arduino ethernet shield. 
Below is the script for the server that Arduino calls in its HTTP request.
The server has the following function: if there is data added to it through a GET request, it stores that data in a text file (called datalog.txt) that is also on the same server. That way my sensor data can be stored as a text file. Secondly, when the server is called with no request, it shows the text of the text file. This way, I can write a program to pull the data from that website and graph it (processing.js, perhaps… more to come later this week on that).
click here for a text file of the code in case it is not showing up correctly below
&amp;amp;amp;lt;?php
// put the name and path of the text file in a variable.
// this is the text file where we'll store the data:
$filename = 'datalog.txt';
//make sure the file is not empty:
if (file_exists($filename)) {
// get the contents of the file
// and put them in a variable called $fileContents:
$fileContents = file_get_contents($filename);
// if there is new data from the client, it'll
// be in a request parameter called &amp;amp;amp;quot;data&amp;amp;amp;quot;.
if (isset($_REQUEST['data'])) {
// append what the client sent as 'data' to
// the variable holding the file contents:
$fileContents = $fileContents . &amp;amp;amp;quot;\n&amp;amp;amp;quot;. $_REQUEST['data'];
// put the file contents back into the file
// you're overwriting the whole file when you do this:
file_put_contents($filename, $fileContents);
} else {
// there was no data sent in the request
// so show the old stuff:
echo $fileContents;
}
}
?&amp;amp;amp;gt;
From the Arduino side, this is the code I use, for now, to append my text file. It is adapted from the example WebClient in the Ethernet library on Arduino.
I just had to enter my MAC address of the ethernet shield and the IP address of the server I am making the request to.
The next step will be to continually make requests as sensor data comes in, to have a legible CSV.
/*
Web client
This sketch connects to a website (http://www.google.com)
using an Arduino Wiznet Ethernet shield.
Circuit:
* Ethernet shield attached to pins 10, 11, 12, 13
created 18 Dec 2009
by David A. Mellis
*/
#include &amp;amp;amp;lt;SPI.h&amp;amp;amp;gt;
#include &amp;amp;amp;lt;Ethernet.h&amp;amp;amp;gt;
// Enter a MAC address for your controller below.
// Newer Ethernet shields have a MAC address printed on a sticker on the shield
byte mac[] = { 0x00, 0xAA, 0xBB, 0xCC, 0xDE, 0x03 };
IPAddress server(69,89,31,63); // Google
// Initialize the Ethernet client library
// with the IP address and port of the server
// that you want to connect to (port 80 is default for HTTP):
EthernetClient client;
void setup() {
// start the serial library:
Serial.begin(9600);
// start the Ethernet connection:
if (Ethernet.begin(mac) == 0) {
Serial.println(&amp;amp;amp;quot;Failed to configure Ethernet using DHCP&amp;amp;amp;quot;);
// no point in carrying on, so do nothing forevermore:
for(;;)
;
}
// give the Ethernet shield a second to initialize:
delay(1000);
Serial.println(&amp;amp;amp;quot;connecting...&amp;amp;amp;quot;);
// if you get a connection, report back via serial:
if (client.connect(server, 80)) {
Serial.println(&amp;amp;amp;quot;connected&amp;amp;amp;quot;);
// Make a HTTP request:
client.println(&amp;amp;amp;quot;GET /understanding_networks/dataLogger.php?data=it_works_yay HTTP/1.1&amp;amp;amp;quot;);
client.println(&amp;amp;amp;quot;HOST: www.levinegabriella.com&amp;amp;amp;quot;);
// client.println(&amp;amp;amp;quot;GET /understanding_networks/dataLogger.php?data=1233212321232123 HTTP/1.0&amp;amp;amp;quot;);
// http://www.levinegabriella.com/understanding_networks/dataLogger.php?data=123
client.println();
}
else {
// kf you didn't get a connection to the server:
Serial.println(&amp;amp;amp;quot;connection failed&amp;amp;amp;quot;);
}
}
void loop()
{
// if there are incoming bytes available
// from the server, read them and print them:
if (client.available()) {
char c = client.read();
Serial.print(c);
}
// if the server's disconnected, stop the client:
if (!client.connected()) {
Serial.println();
Serial.println(&amp;amp;amp;quot;disconnecting.&amp;amp;amp;quot;);
client.stop();
// do nothing forevermore:
for(;;)
;
}
}