more joint work
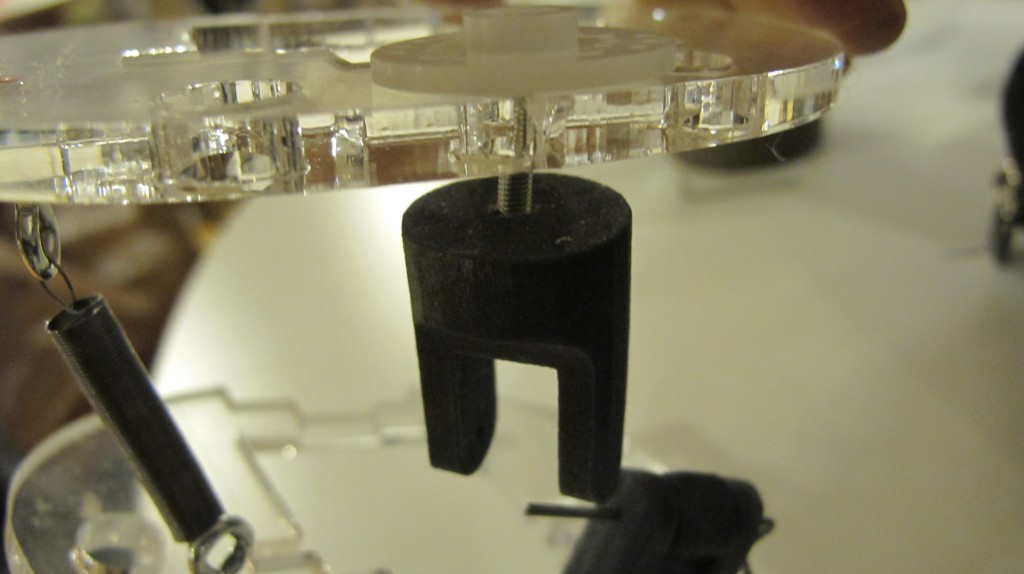
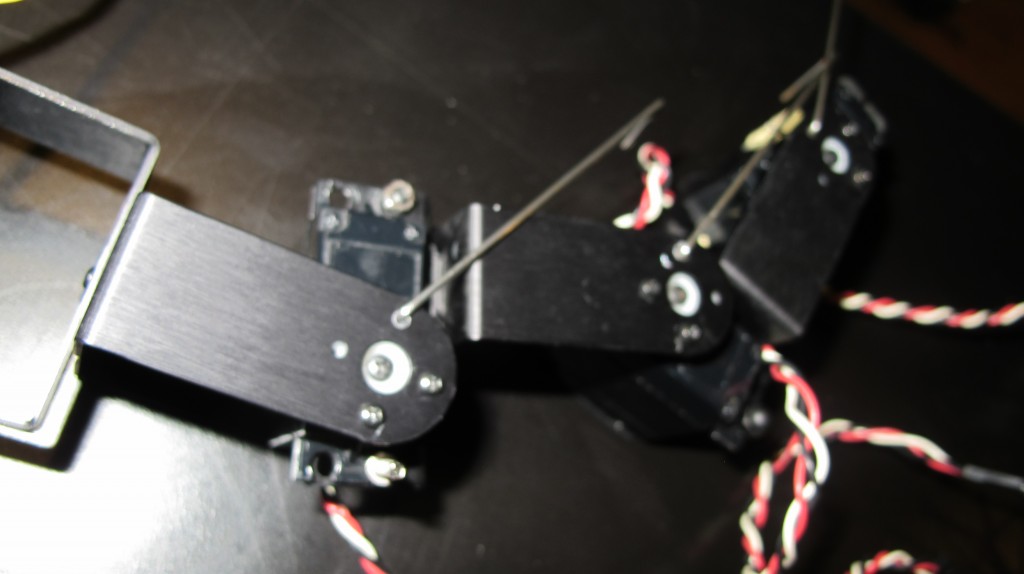
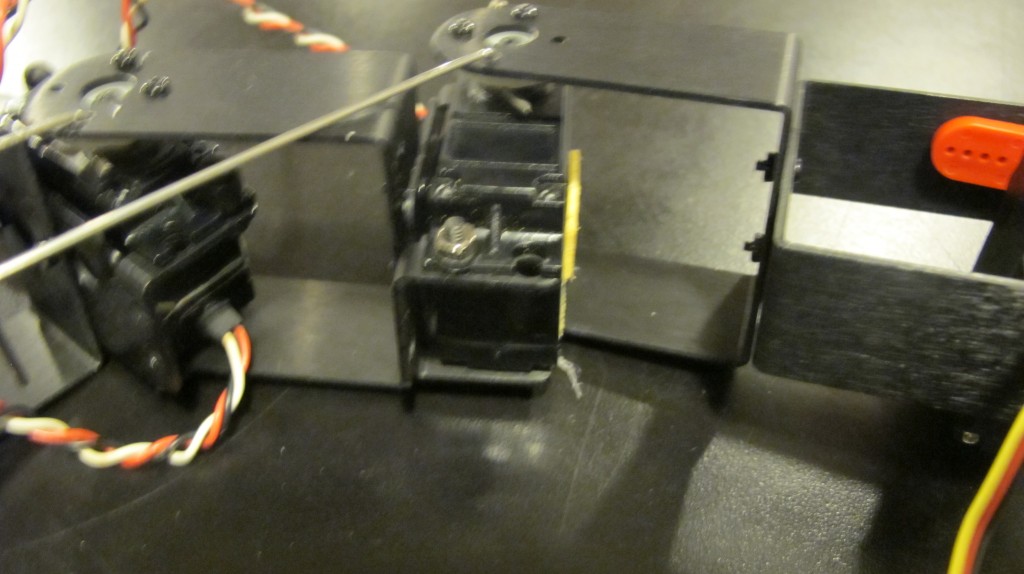
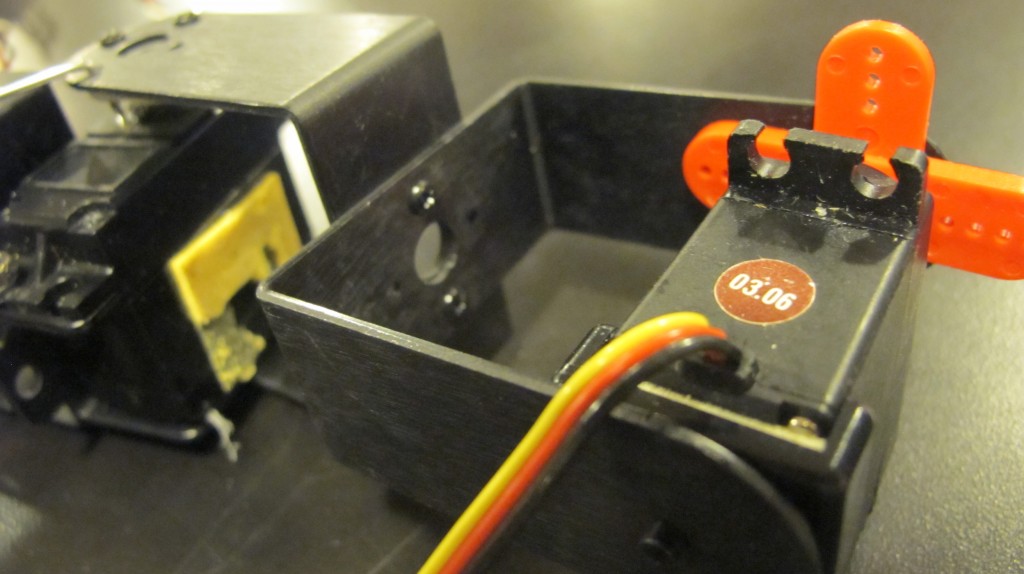
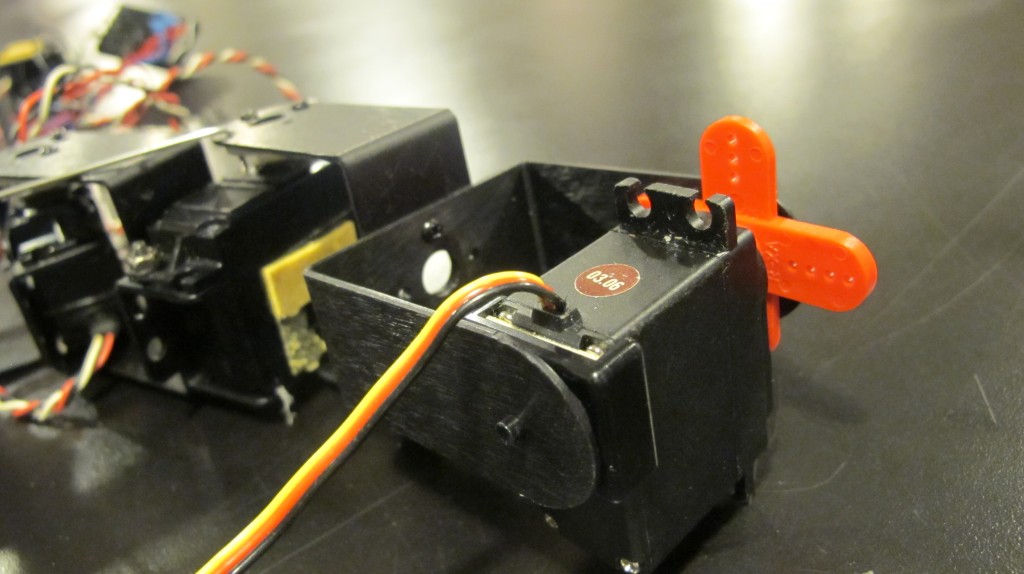
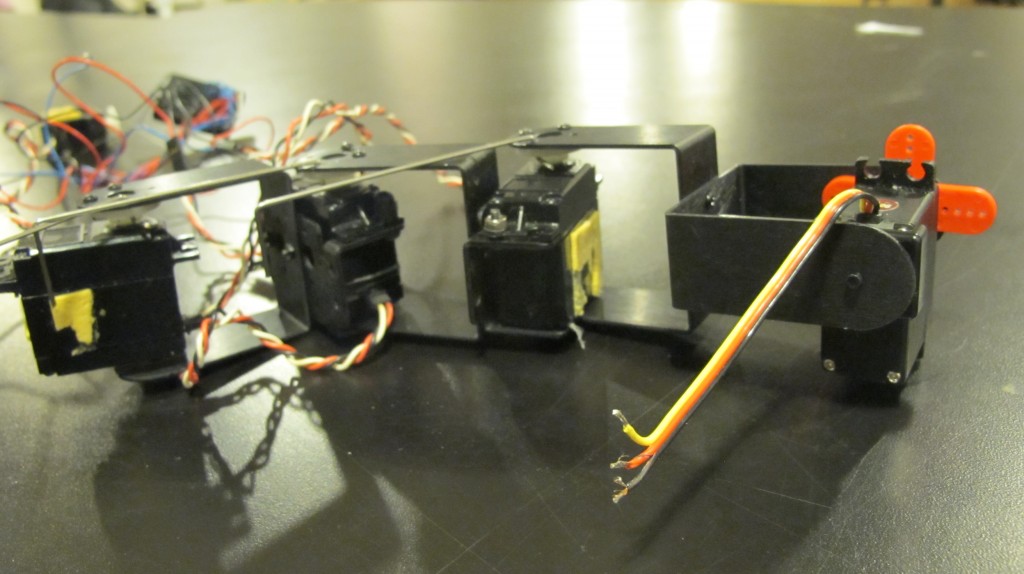
To summarize: I started experimenting with making my own joints and ribs, by cutting corrugated plastic ribs, and 3d printing universal joints at AMS. Then, my intention was to use springs and servos to enact articulation.
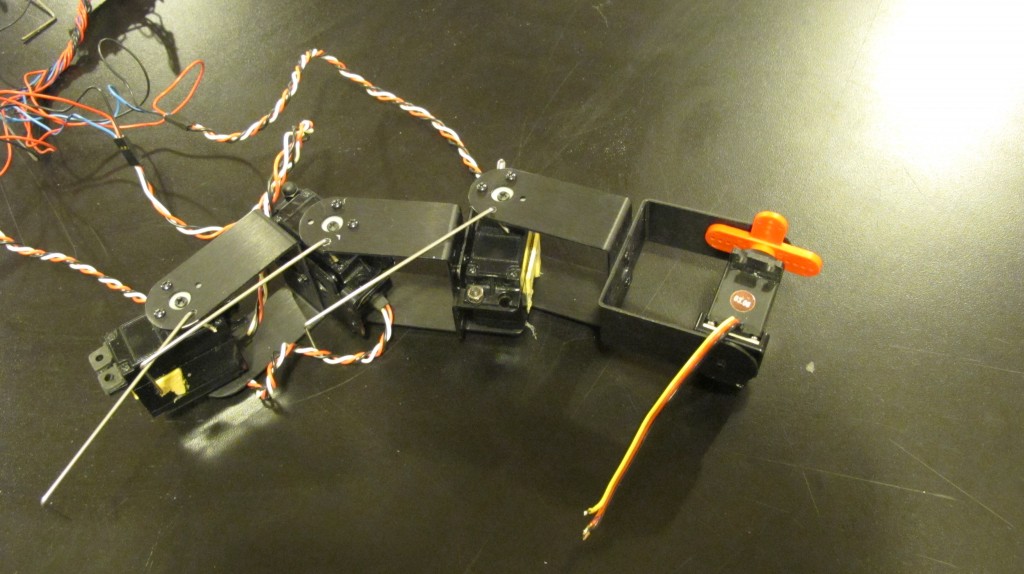
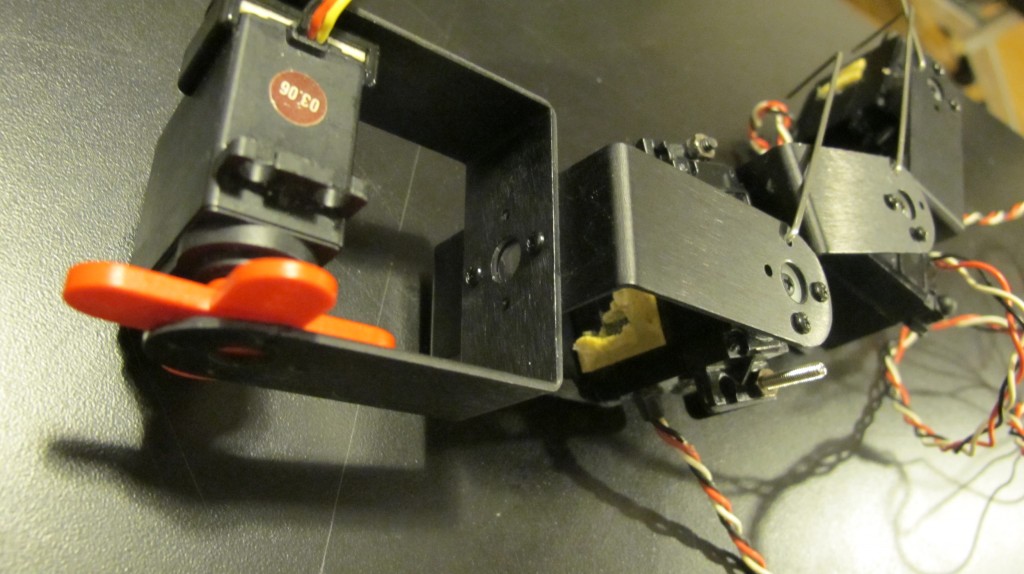
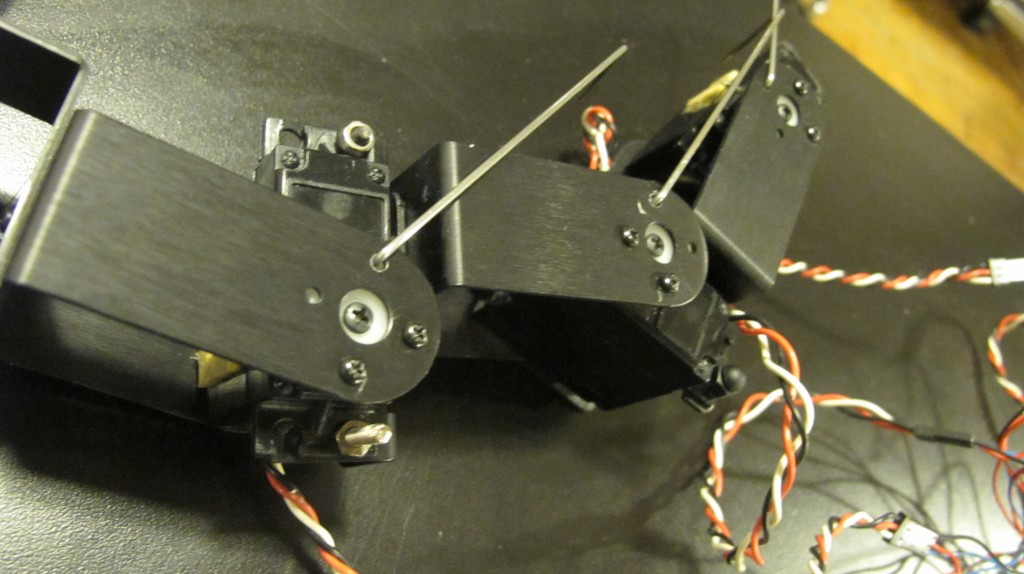
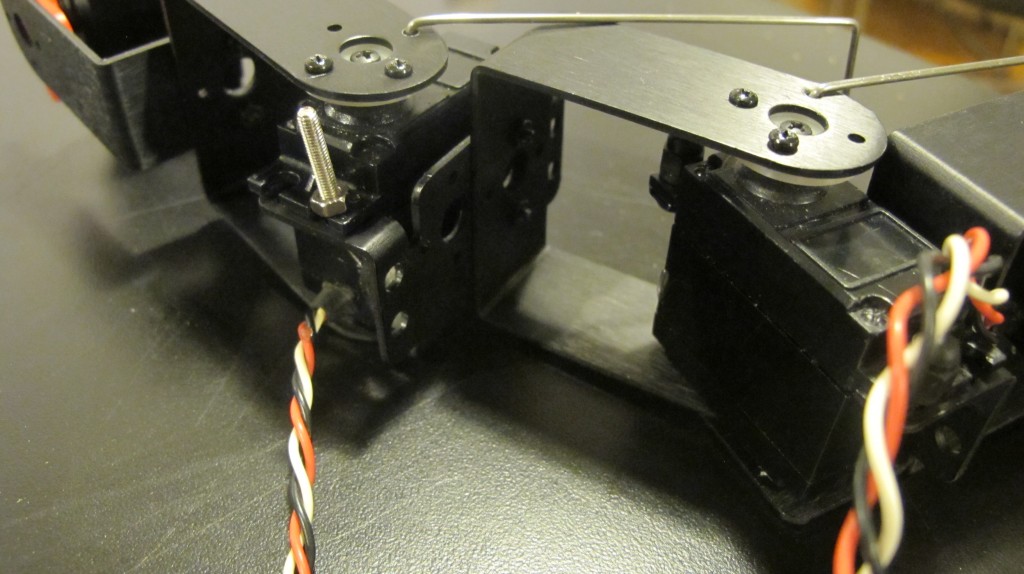
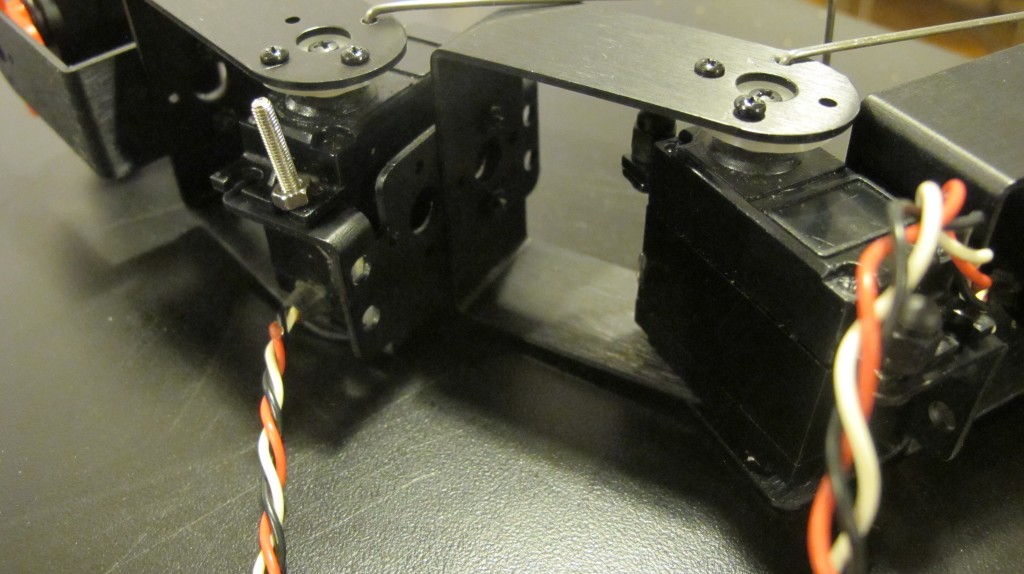
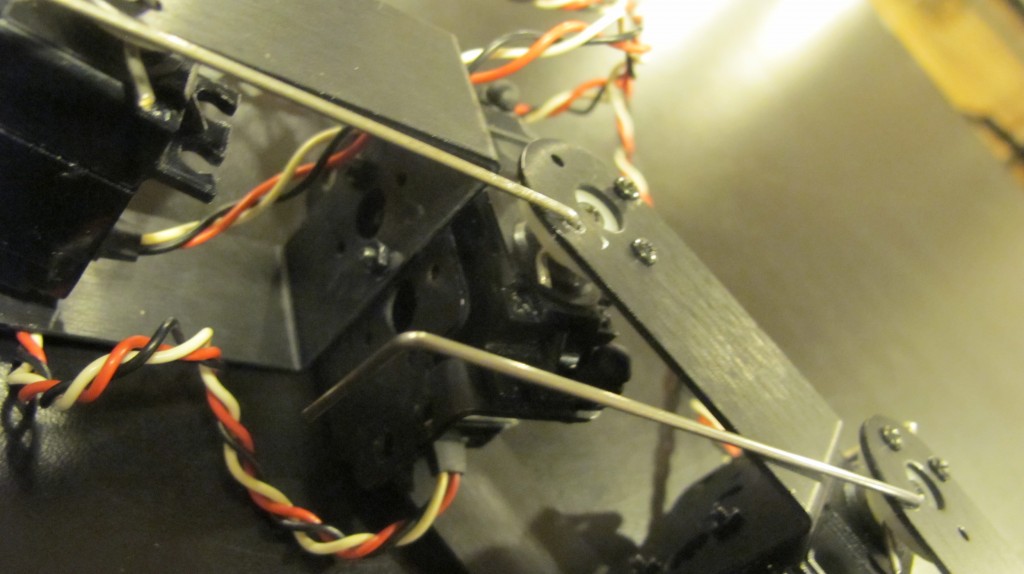
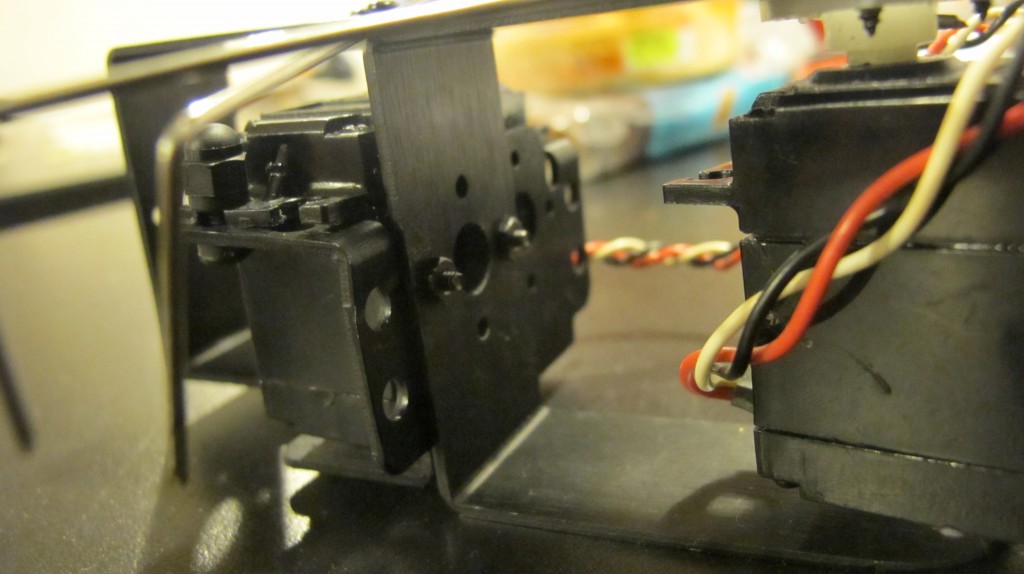
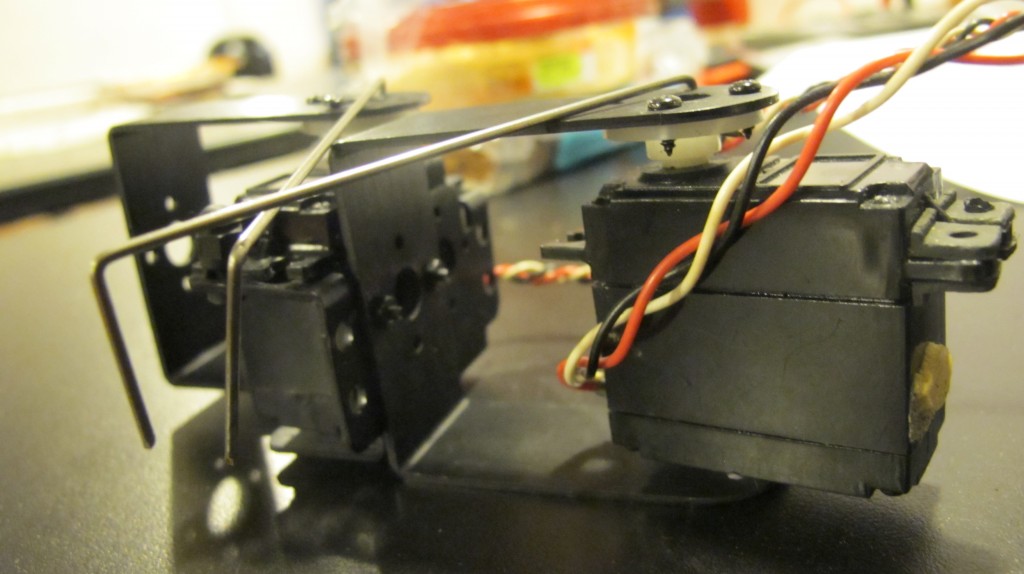
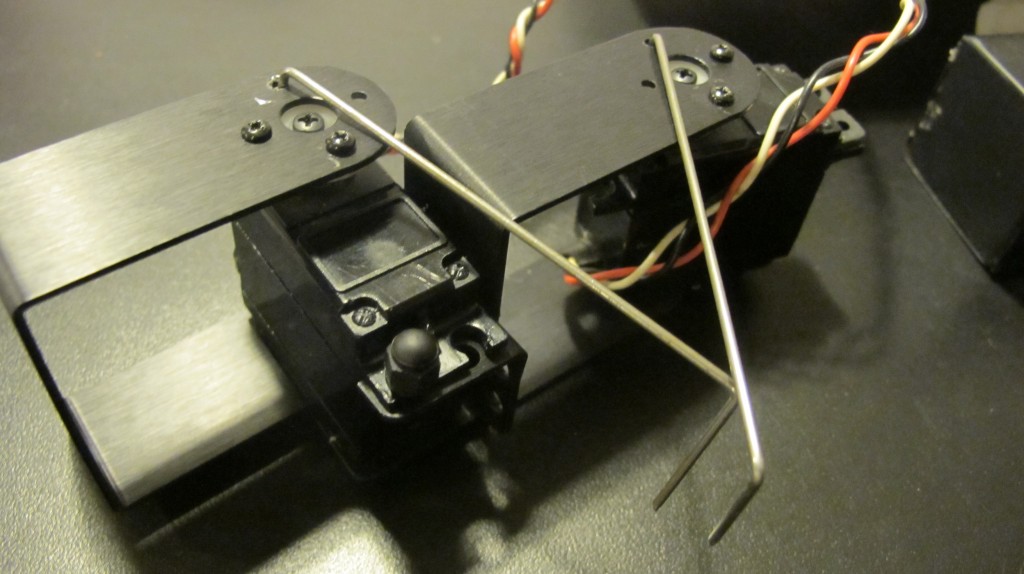
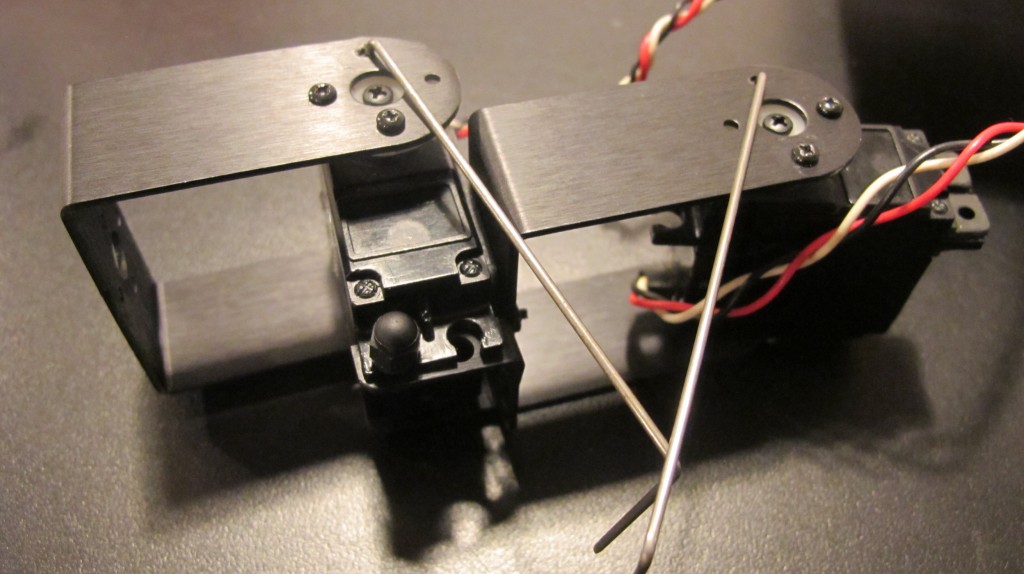
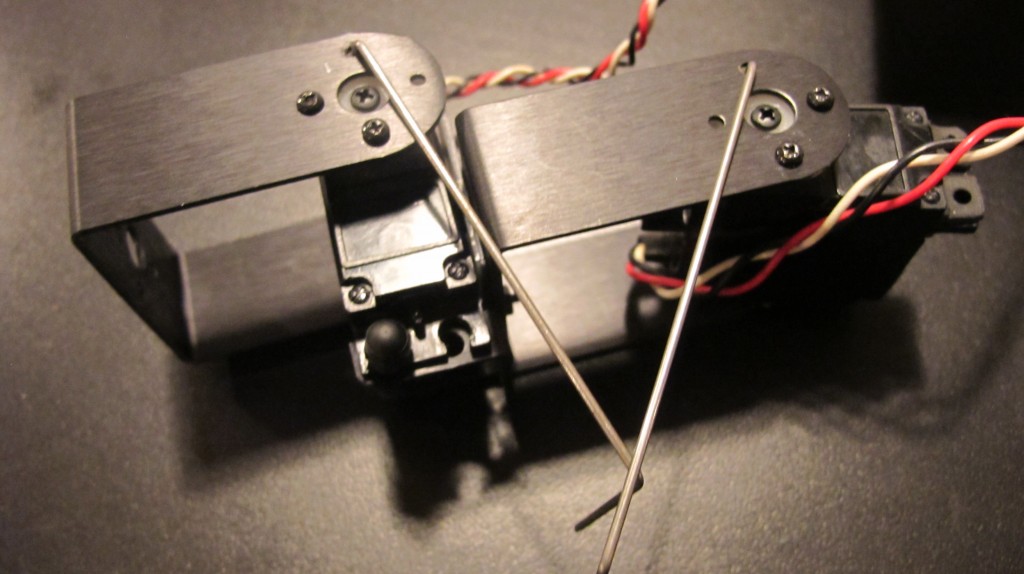
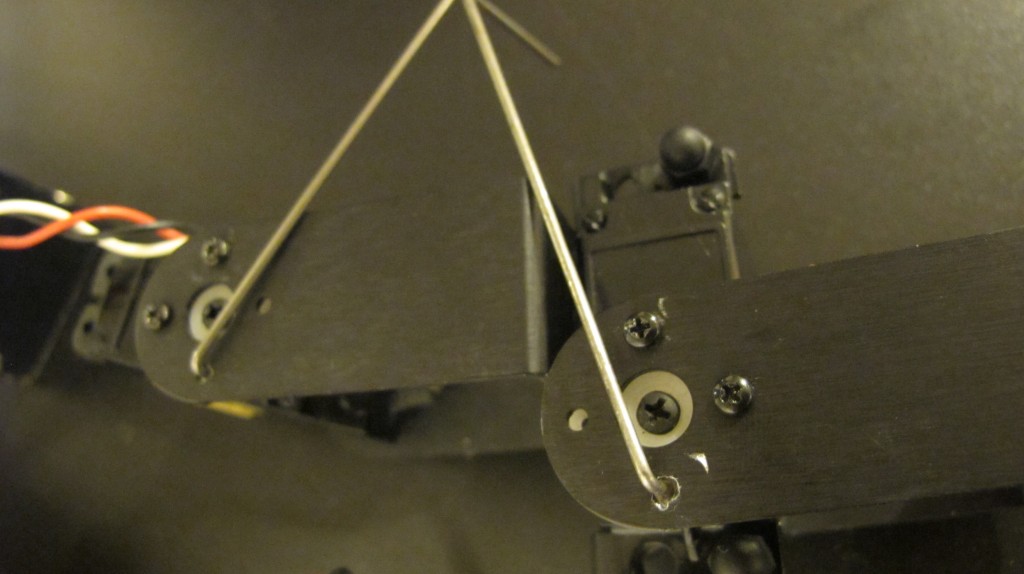
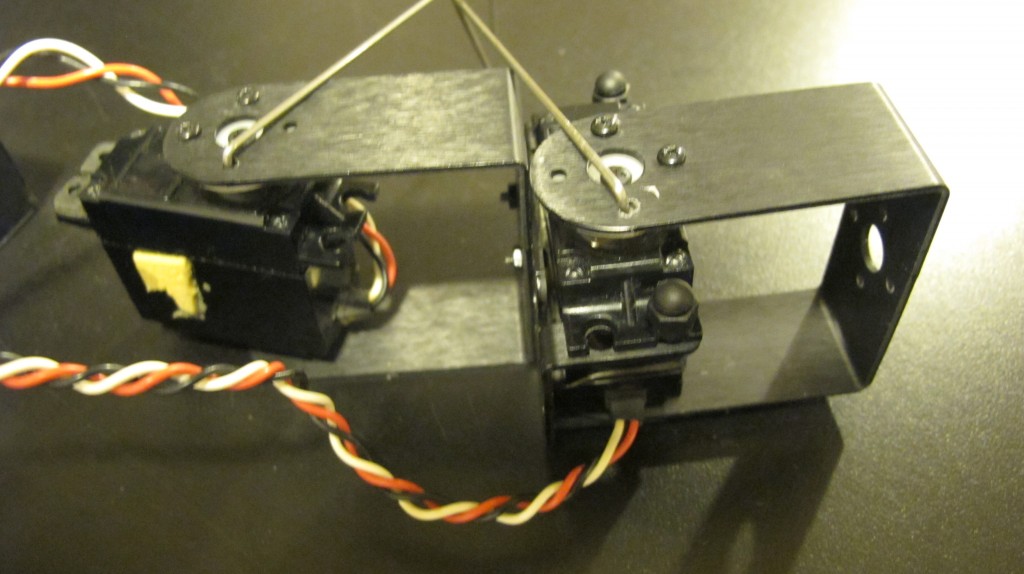
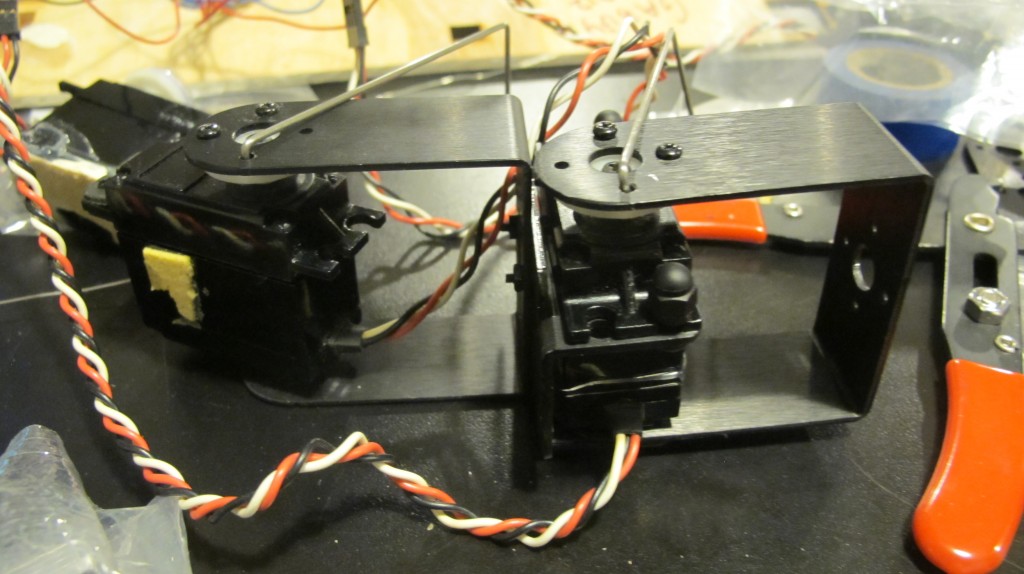
However, I started using u-joint servo brackets, that are super stable, and I will continue with this. https://github.com/gabriella/Servo_wave
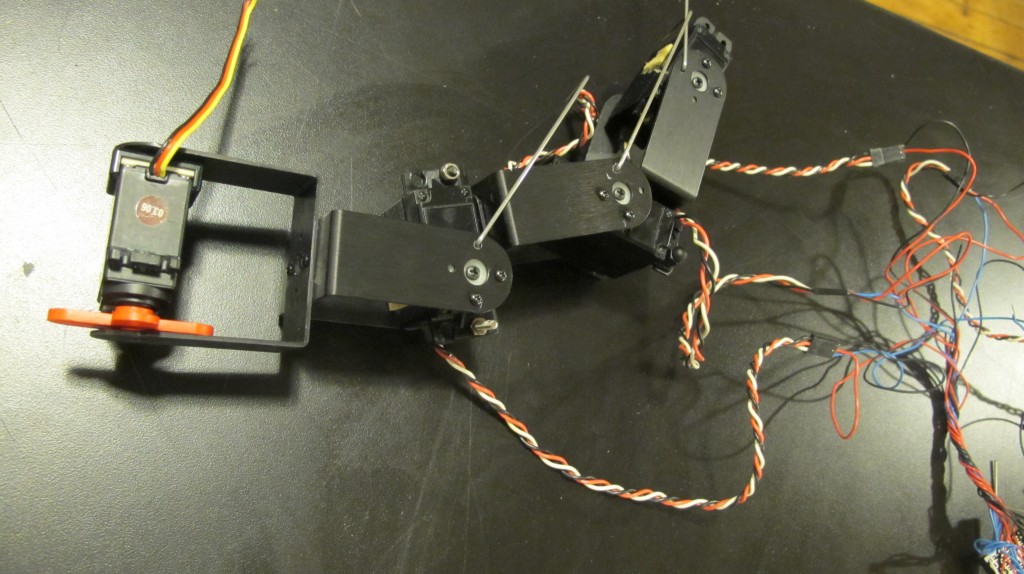
Here is the code I finally got to work. Basically, I am storing a table of values, a formula for a sin wave, and each servo is at a different index along the wave values, oscillating up and down. I can therefore control wavelength, speed of the wave propagation, offset from one servo to another, amplitude of the wave, etc.
int total = int(TWO_PI/0.01);//total number of indexes points, points
//until the amplitude is back to zero
float[] wave = new float[total];//array for the amplitude of the
//object to be drawn betwen 0 and ht
int numBalls = 40;
int[]index= new int[numBalls];// 1 = 0;//
int sp = 1;
float ht=1;
//changer = 10;
void setup() {
size(800, 400);
float a = 0;
for (int i = 0; i < wave.length; i++) {
wave[i] = map(sin(a), -1, 1, 0, 180);
println(wave[i]);
a+=0.05;
}
//print(wave.length);
//print(total);
//print(index.length);
for (int i = 0; i < index.length; i++) {
index[i] = i*5;
}
}
void draw() {
background(0);
fill(255);
for (int i=0;i<numBalls;i++) {
ellipse(i*20, ht*wave[index[i]], 10, 10);
index[i] = (sp*index[i]+1) % wave.length;
}
}
void keyPressed(){
if(key=='a'){
ht=ht+0.5;
}
if(key=='s'){
ht = ht-0.5;
}
if(key=='q'){
sp++;
}
if(key=='w'){
sp--;
}
println(ht);
}