Archive for May, 2012
Documentation of Sneel_002
Soon I will make a how-to guide for Sneel_002 on instructables.com, as I did for the first version of Sneel, (i’m working on that) but until then…
Sneel swam in central park

The hardware:
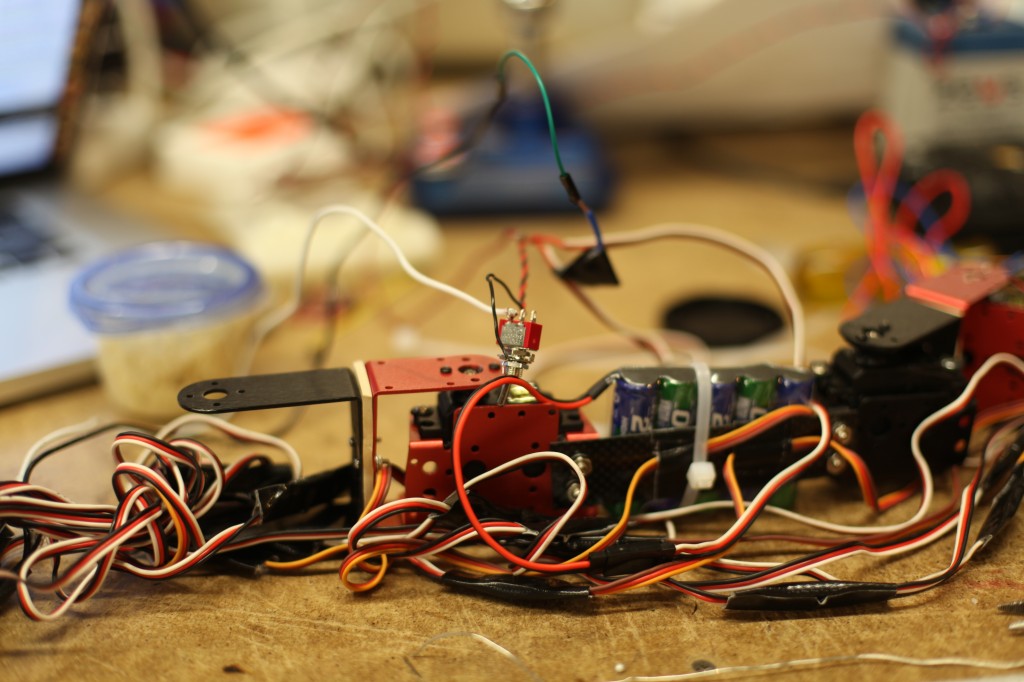
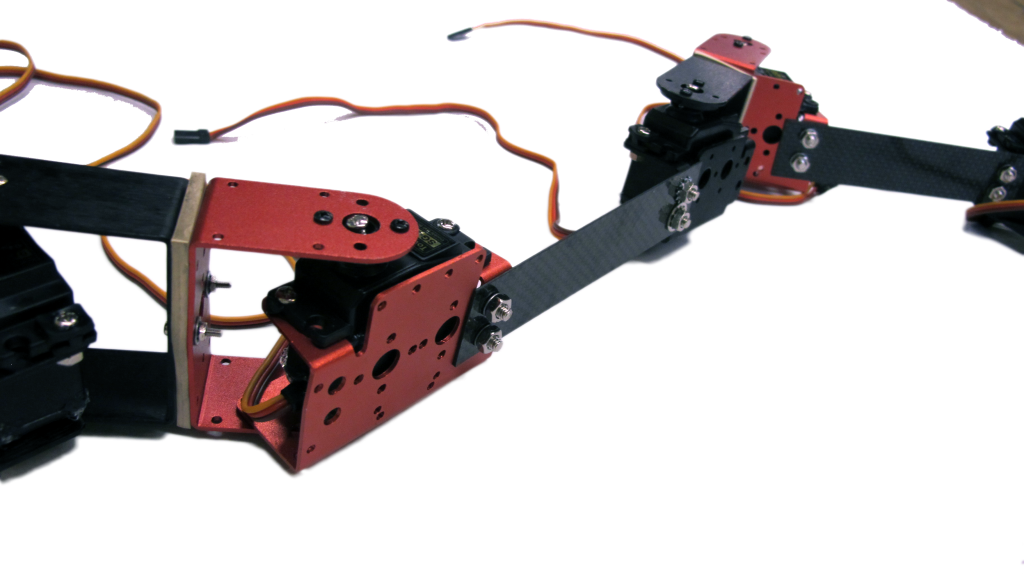
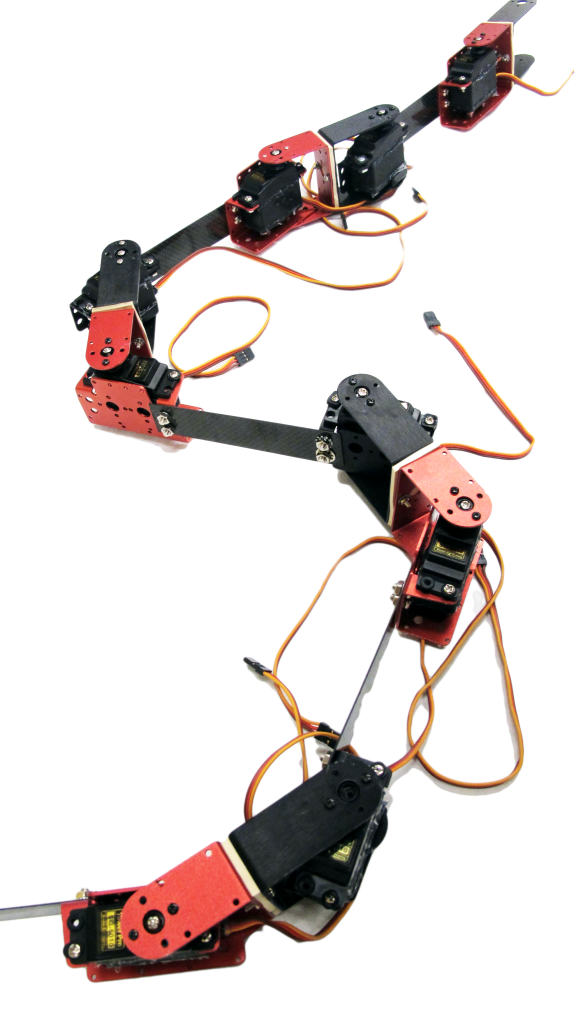
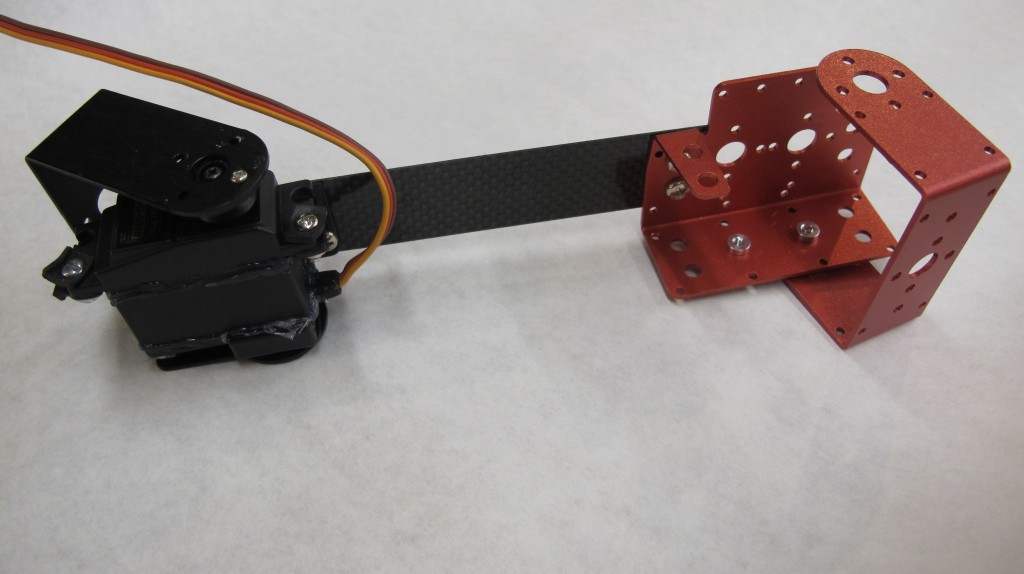
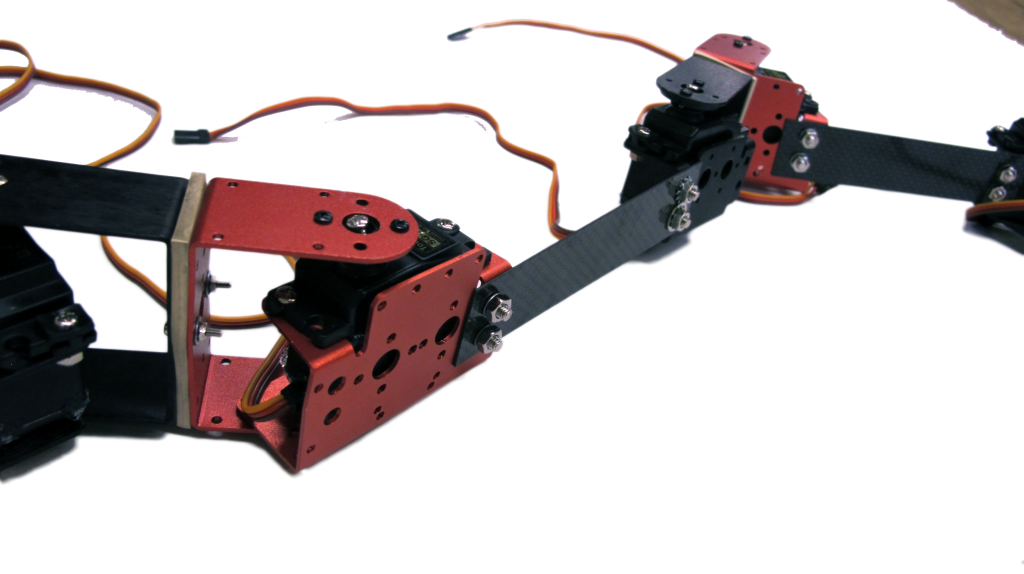
Like a real snakes vertebrates:



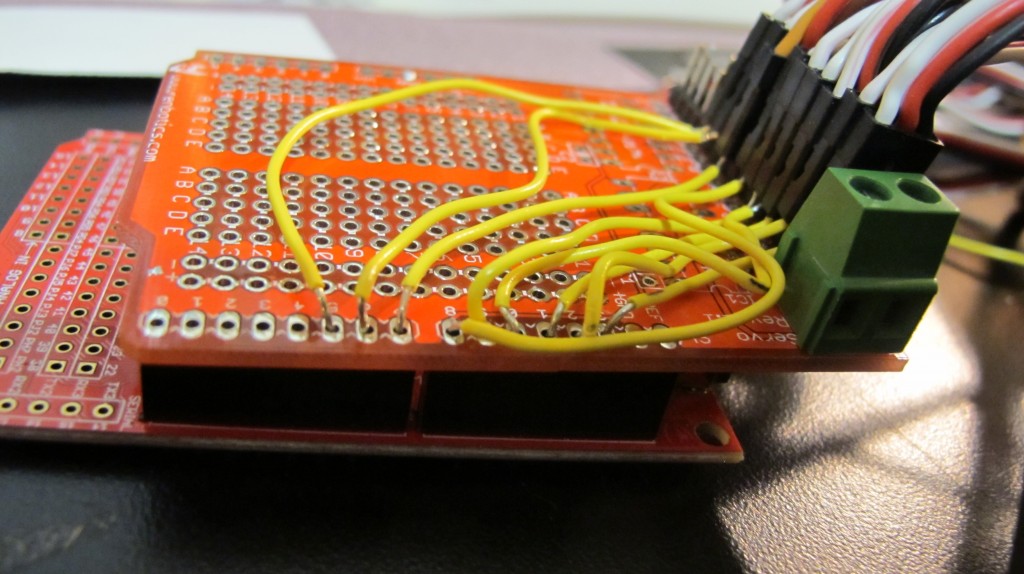
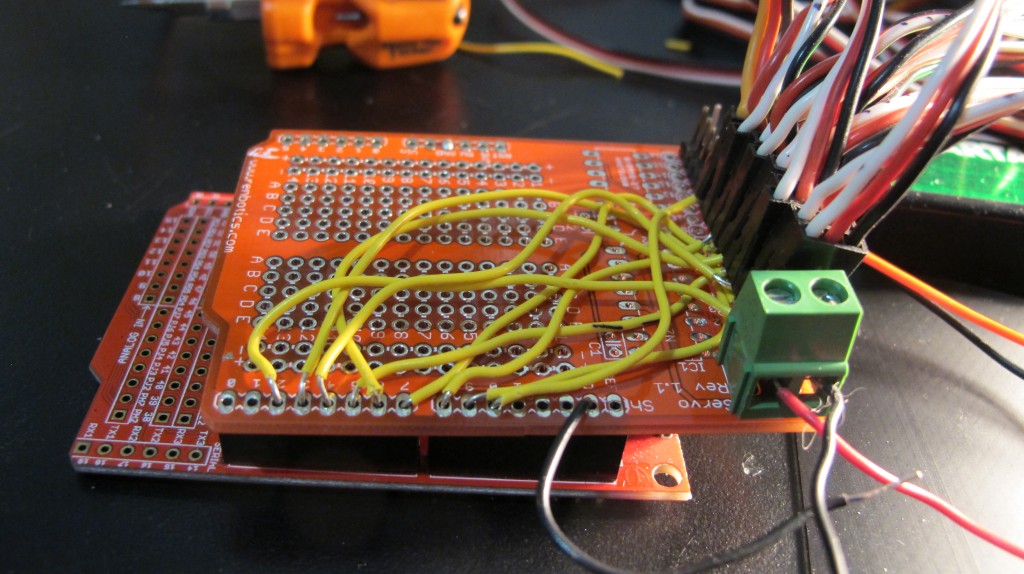
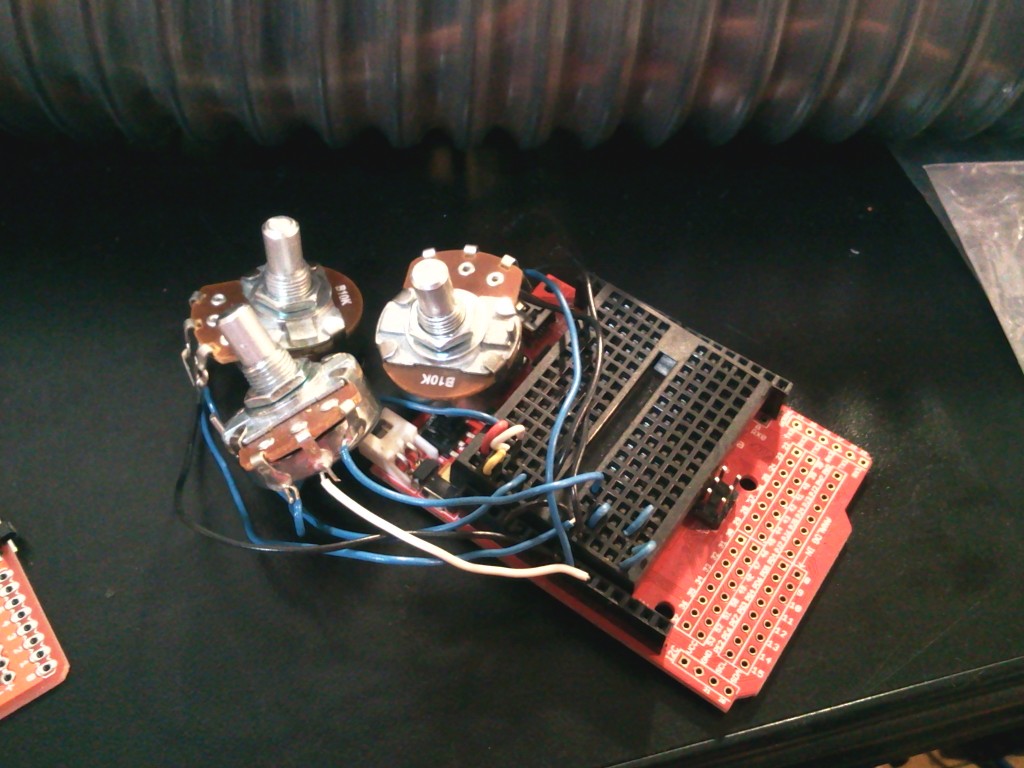
I used Arduino Mega with multiple servos attached, using multiple 6V NiMh battery packs, placed along the body, with an xbee mounted on top to control three parameters of wave behavior: period, wavelength, and amplitude.


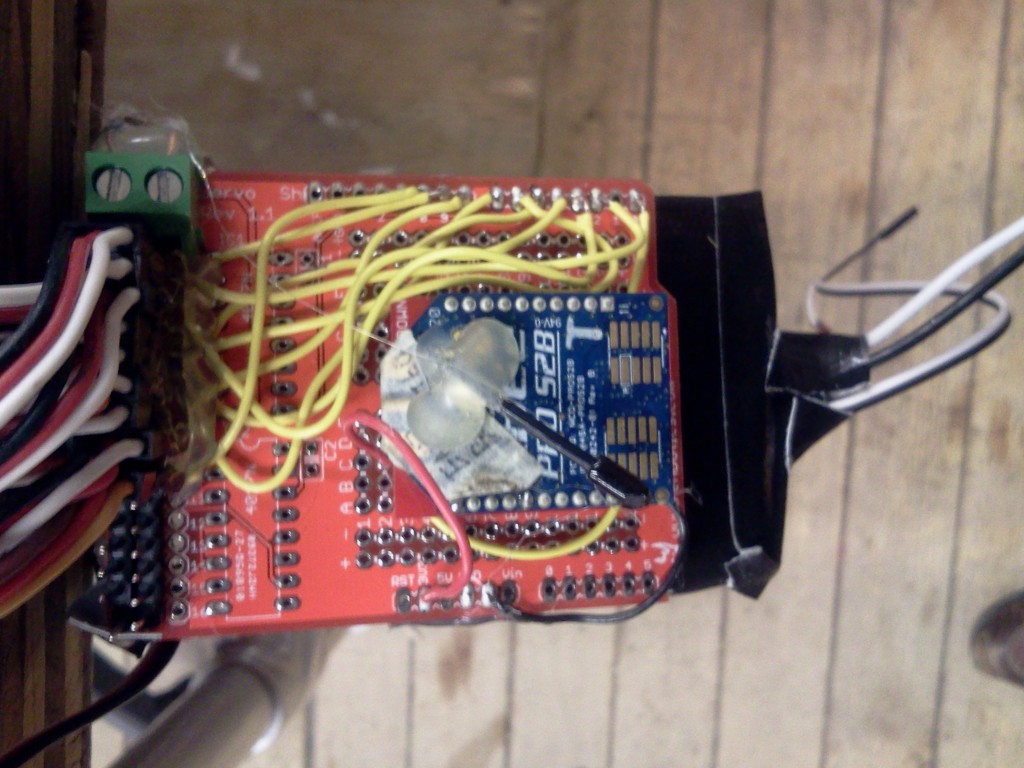
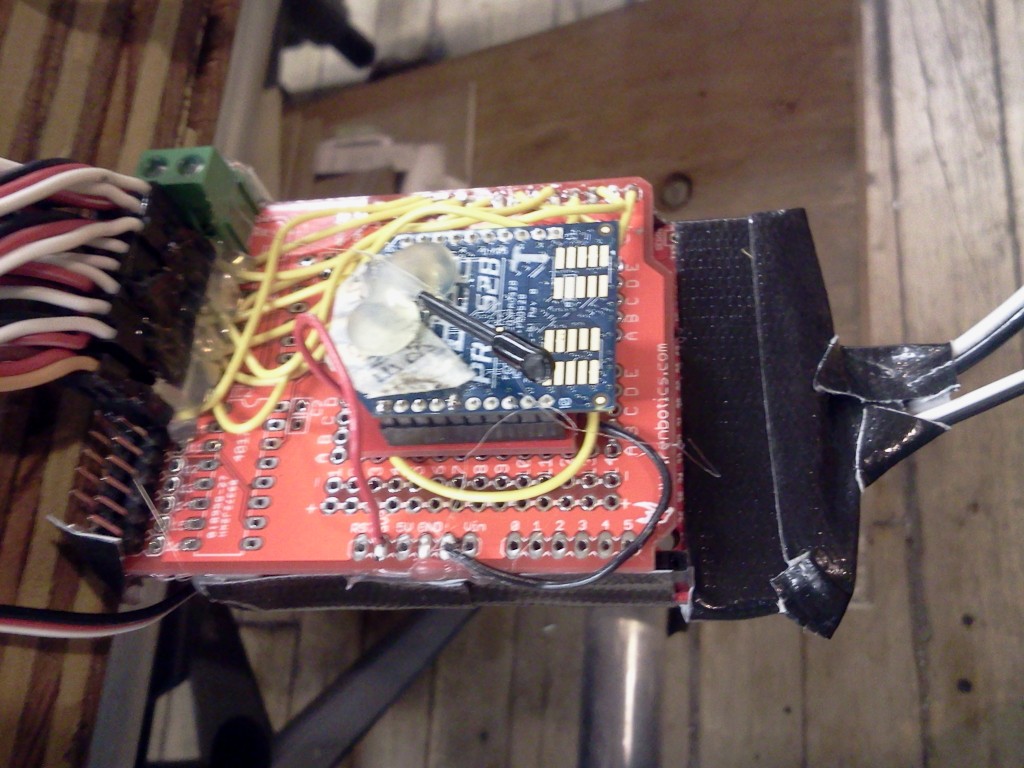
I taped the bottom of the Arduino so nothing shorted:

First I stuffed the arduino + xbee into a waterproof sac:

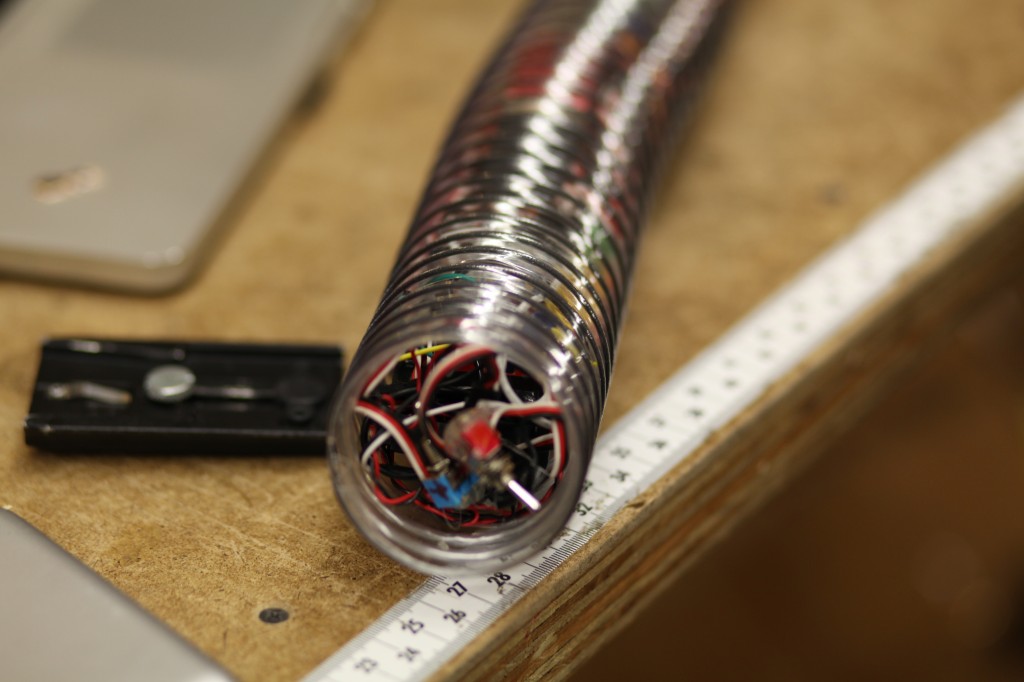
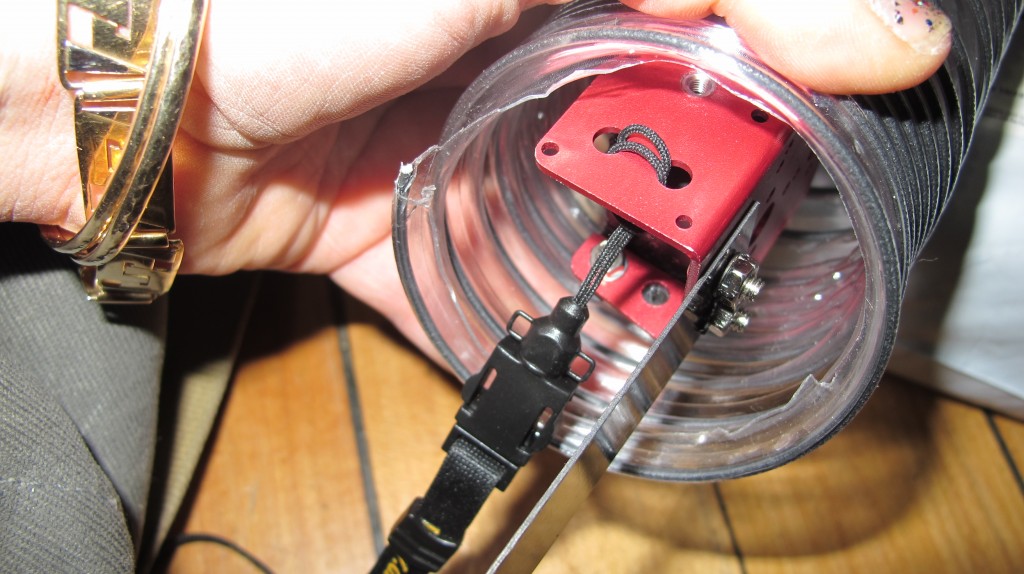
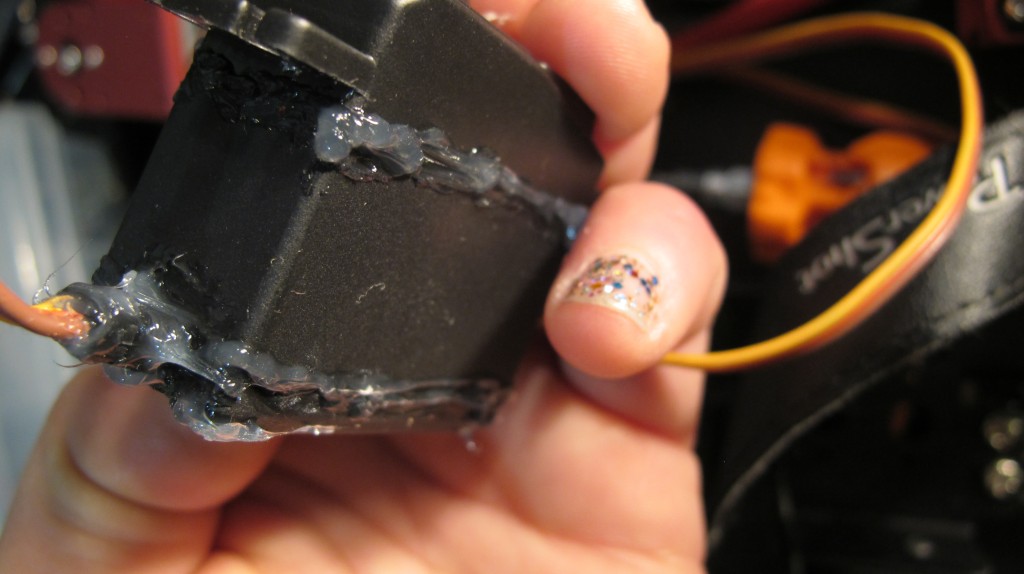
Then I decided that was overkill so I just stuffed everything into the tube (as I had sealed each servo motor with epoxy and had a water tight seal on the tube top and bottom)

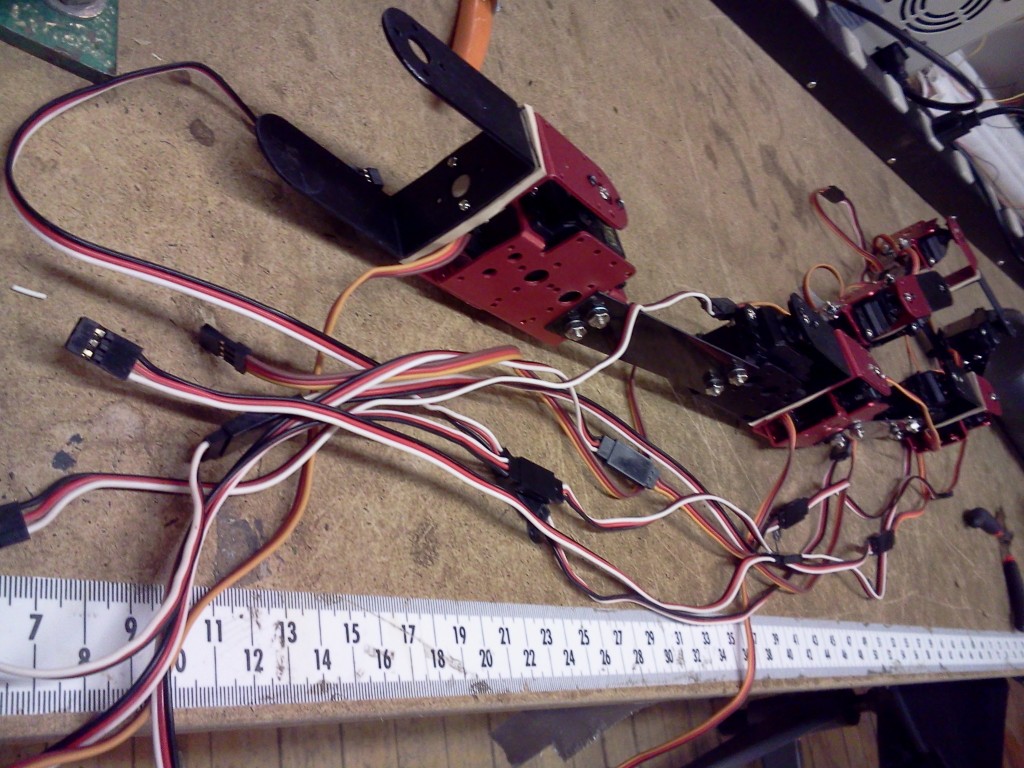
See the waterproofed servos:

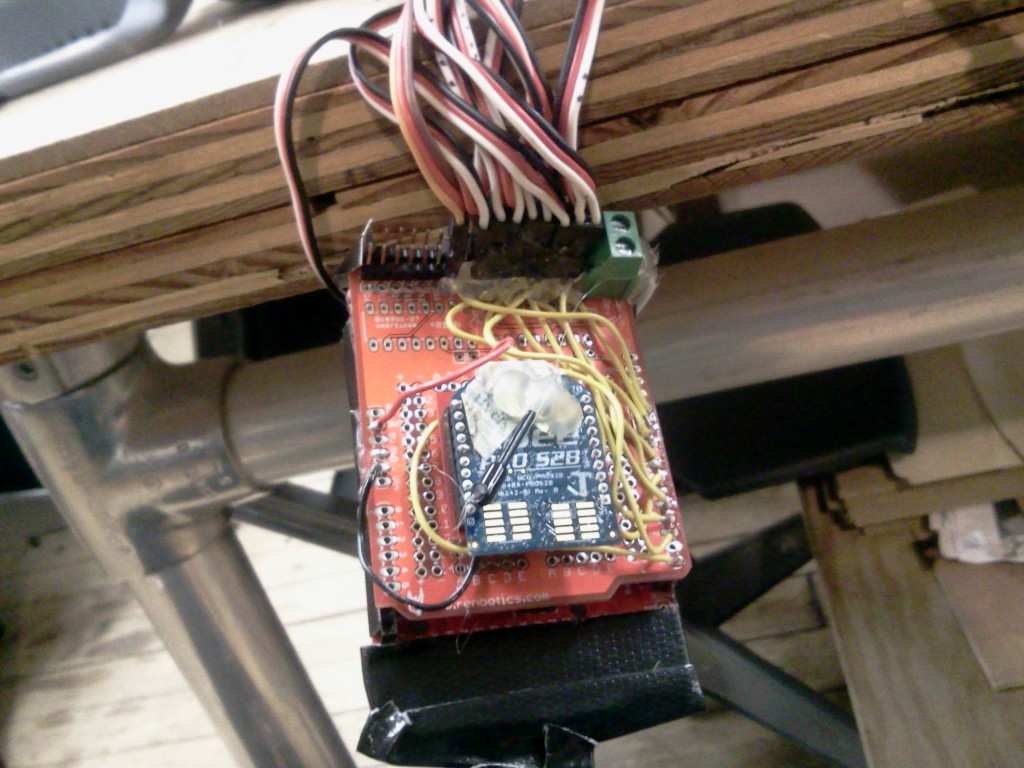
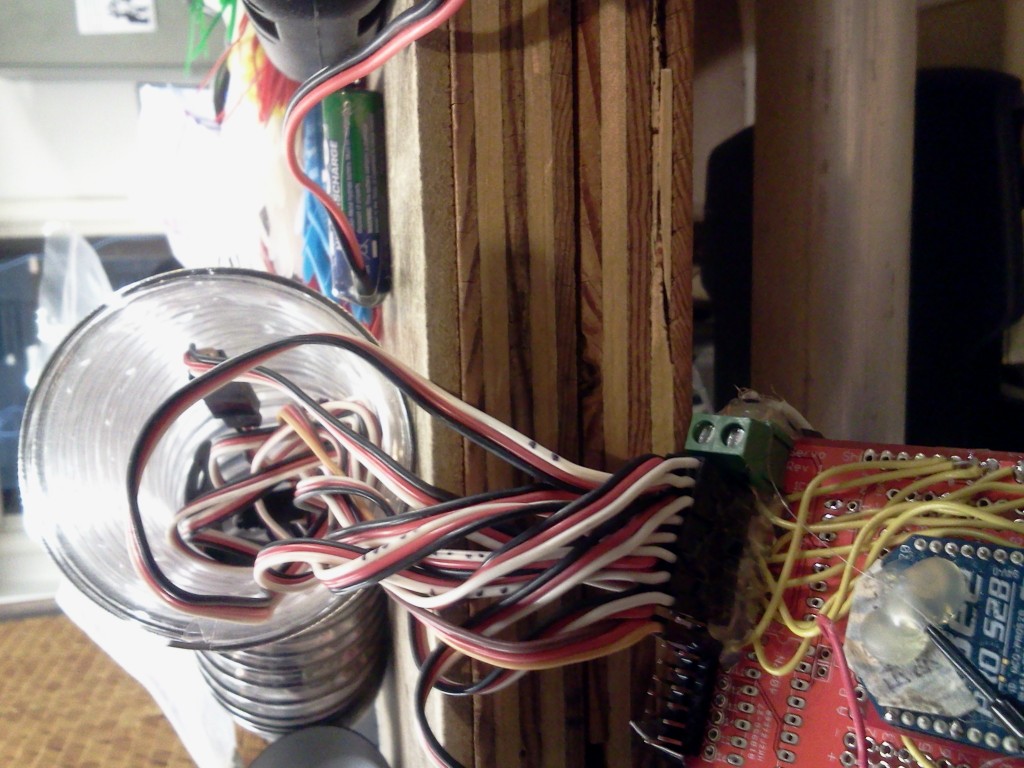
See wires etc. stuffed in the tube:



The Software:
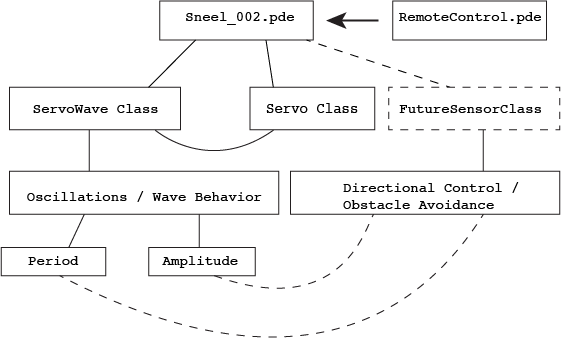
A diagram of the control firmware and the relationship between the classes:

I wrote an Arduino library called ServoWave to control period, amplitude and wavelength of the oscillation for Sneel’s swimming behavior.
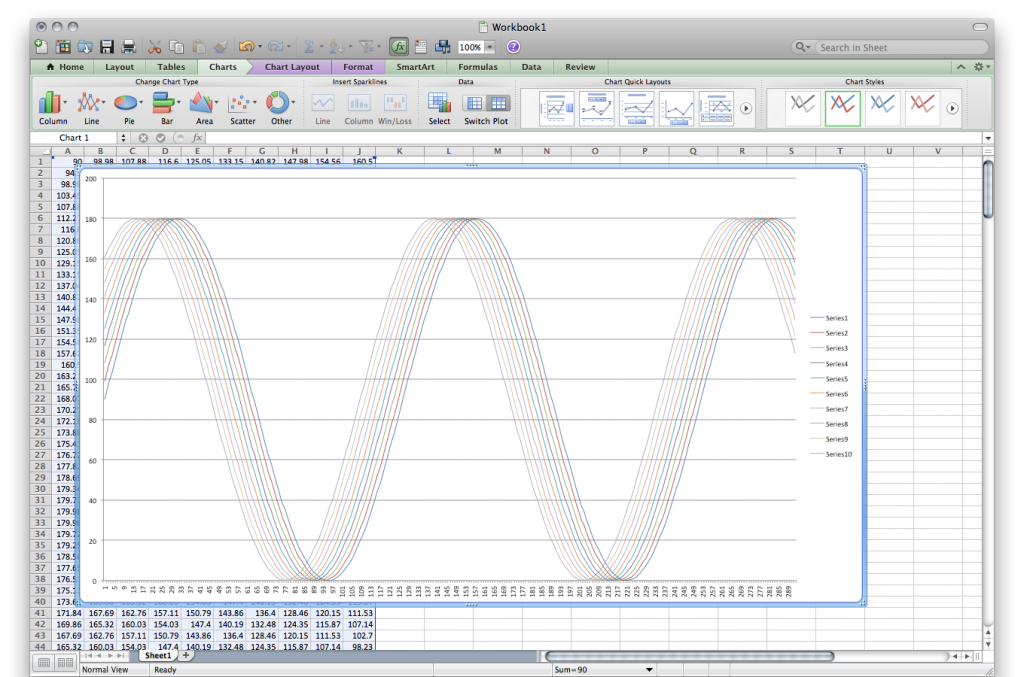
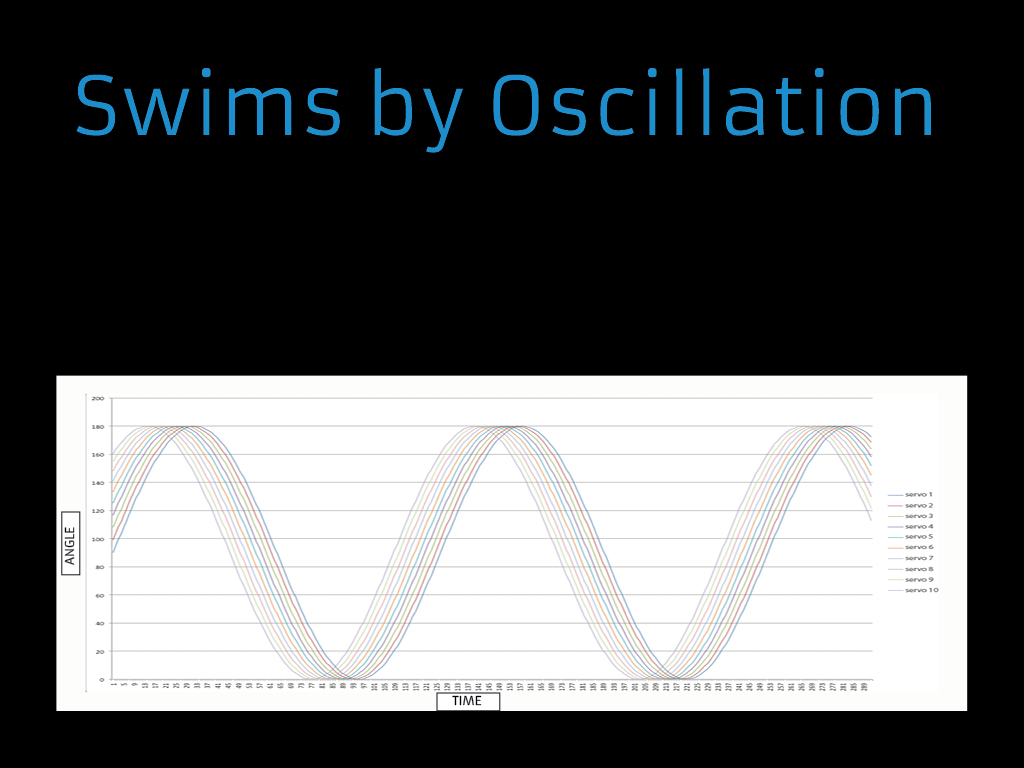
See how each servo motor oscillates – in the following graph, I print out values of each servo as each motor rotates in a sine wave slightly out of phase from each other. The x axis is time and the y axis is angle, and each colored line is a different motor.

After getting everything packed up in the tube, I tested Sneel_002 on the floor of ITP.
He seemed sort of real:
Sneel in the wild:
Well, Sneel_002 swam pretty well, sort of like a real snake, but there’s much work to be done…
Model shot: