sneel




FUELING INNOVATION THROUGH SHARED TECHNOLOGY
![]()
Fueling Innovation Through Shared Technology
-
AUTHOR: Gabriella Levine // CATEGORY: 2013 Event, Blog, Guest, Program, Speakers
Aug
 INNOVATING BASED ON MODELS
INNOVATING BASED ON MODELSTechnology has always been innovated based on other people’s successes, from the discovery that the earth was round, to the invention of the telephone, steam engine, or airplane. And scientists have found resources in biological systems for technological innovations, for example the development of VELCRO modeled after a Burr plant, or SONAR inspired by the echolocation in bats.
OPEN HARDWARE MOVEMENT
 Although patent laws were originally designed to protect inventors’ ideas, patents constrain further innovation. The more that designs and processes can be open and shared, the quicker that innovation can happen.
Although patent laws were originally designed to protect inventors’ ideas, patents constrain further innovation. The more that designs and processes can be open and shared, the quicker that innovation can happen.There are many examples of successful businesses openly sharing software, such as Mozilla and Linux, but the rise of the Open Hardware trend is just beginning. The Open Hardware definition[1] states that it is any hardware whose documentation is made publicly available for others to use, modify, and distribute. This growing trend is founded in the belief that sharing ideas, designs, and methodologies can bring technological innovation and manufacturing mainstream on local and global scales, making it easier to engineer new solutions to complex problems.

Open Hardware projects that facilitate free sharing of documentation, source code, and CAD designs, are an approach to proliferate innovation. Arduino, a platform developed for hobbyists to make electronic prototypes, has expanded the world of hardware development from electrical engineers to artists, hobbyists, and even youth. Open Hardware projects range from industrial machines [open source ecology], 3d printers [RepRap], environmental disaster relief efforts [Protei, Open Relief], and underwater robotics [openROV].
STEALING INFORMATION
As modern technology and the Internet dissolves boundaries between countries and people, even expensive information is getting easier to steal. Evidence of this can be seen from the recent rise of industrial espionage by mostly Chinese University students gaining access into US University and Library material. The recent NY Times Article on the rise of Cyberattacks [2] cites Bill Mellon of the University of Wisconsin saying, “We get 90,000 to 100,000 attempts per day, from China alone, to penetrate our system”.
China is a special mecca for hackers. Companies employ hackers to spy on competitors’ trade secrets, and Chinese universities partner with corporations to sponsor hacking competitions that army talent scouts attend. China’s rapidly accelerating economic growth and extreme rate of production, as well as the immense pressure to publish research papers explains the intensity of cyber-hacking in academics and business. For instance, 31% of the publications Journal of Zhejiang University–Science were deemed to be plagiarized[3], .
SHANZHAI
 A very interesting trend has sprouted from China’s copycat culture, called Shanzhai, literally meaning “Mountain Fortress”[4]. Shanzhai refers to a cluster of about 300 “underground” factories tucked away in the mountains of Shenzhen, China. These factories rapidly produce cheap knock off consumer electronics such as watches and iPhones. Brand names include NOKLA (Nokia knockoffs) and Hi-Phone (iPhone copycats). Although quite secretive and hard to access, Shanzhai is not a small operation: by 2010, Shanzhai cell phones took 20% of the 2G market[5].
A very interesting trend has sprouted from China’s copycat culture, called Shanzhai, literally meaning “Mountain Fortress”[4]. Shanzhai refers to a cluster of about 300 “underground” factories tucked away in the mountains of Shenzhen, China. These factories rapidly produce cheap knock off consumer electronics such as watches and iPhones. Brand names include NOKLA (Nokia knockoffs) and Hi-Phone (iPhone copycats). Although quite secretive and hard to access, Shanzhai is not a small operation: by 2010, Shanzhai cell phones took 20% of the 2G market[5].SHANZHAI and OPEN HARDWARE
There are many similarities between Shanzhai and the Open Hardware community. Both Shanzhai and Open Hardware projects borrow information, tools, source code, CAD files, and techniques; both improve upon other’s work to accelerate development.
What differentiates Shanzhai from Open Hardware projects is that it doesn’t build upon the work of others for increased innovation, but it exactly copies it and prices it lower.
BORROWING FROM NATURE : OPEN SOURCING BIOLOGY

Not only does technology proliferate by building upon the innovation of others, but drawing inspiration from biological processes has also refined technological innovation. In contemporary times of extreme technological advancement, social infrastructures (Facebook, Google, Yahoo) are built upon sourcing individual data to inform collective intelligence. Redesigning urban frameworks for efficient transit options is becoming increasingly critical due to growing urban populations. Therefore, looking to biology for influence for organizing emergent intelligent systems is increasingly crucial for design considerations.
Biomimicry as used in design and engineering takes the form of copying a form and function (like the use of a fin for swimming), modeling principles occurring in nature (such as aerodynamics for flight), or mimicking organizational principles (modeling online social networks on ant colonies). A pivotal example of biomimetic design is the experimental IBM computer chip, released in 2011, that emulates the human brain’s cognition.
Using complex yet efficient biological systems as a model and a mentor for design and engineering solutions parallels the way that Open Hardware projects can increase innovation potential through building upon effective past work.
EXPLORING BIOMIMETIC DESIGN: BIOMIMICRY AND OPEN TECHNOLOGY IN ACTION
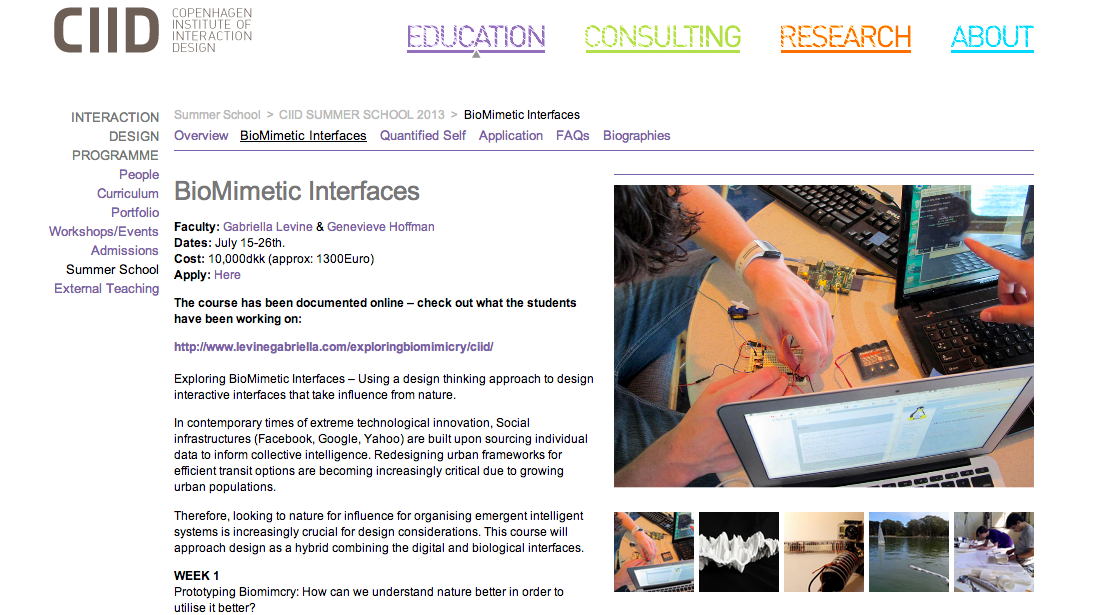
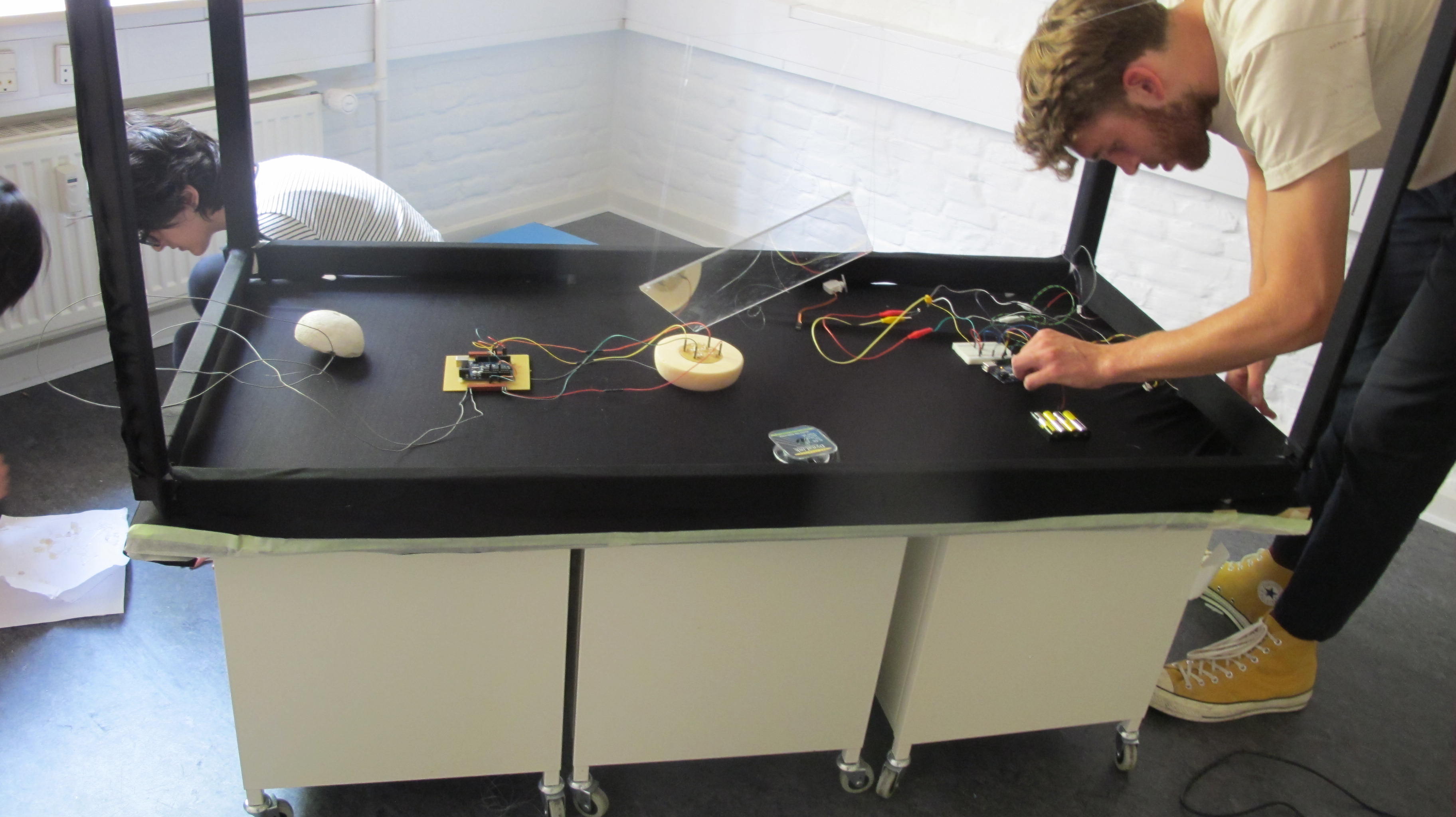
I just returned from teaching a 2 week course at CIID (Copenhagen Institute of Interaction Design)[6] in Denmark. With the use of open source electronics boards and modular code libraries shared online through open source communities (such as Adafruit, Sparkfun, and DIYDrones), the students’ projects were able to reach great levels of sophistication, conceptually and technologically, in a short amount of time.

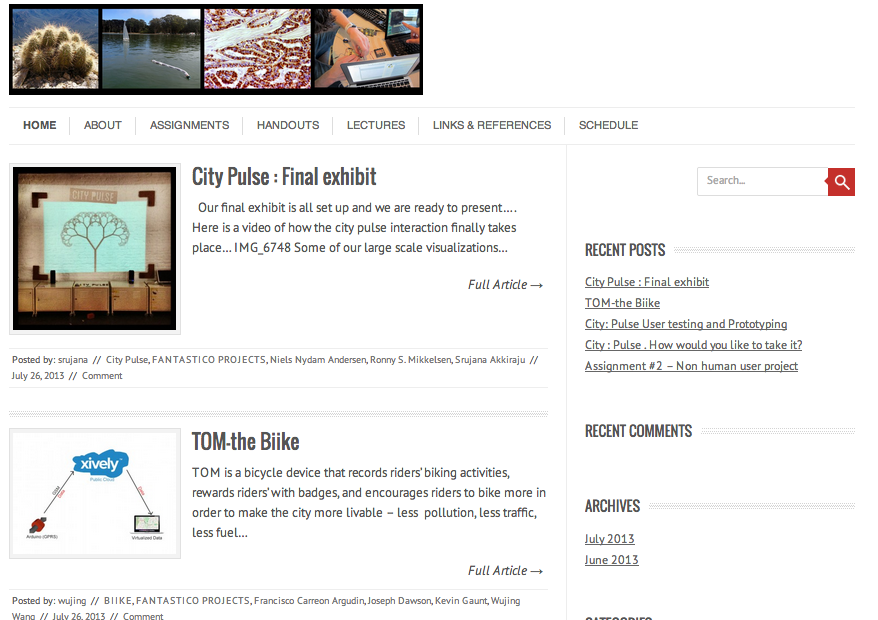
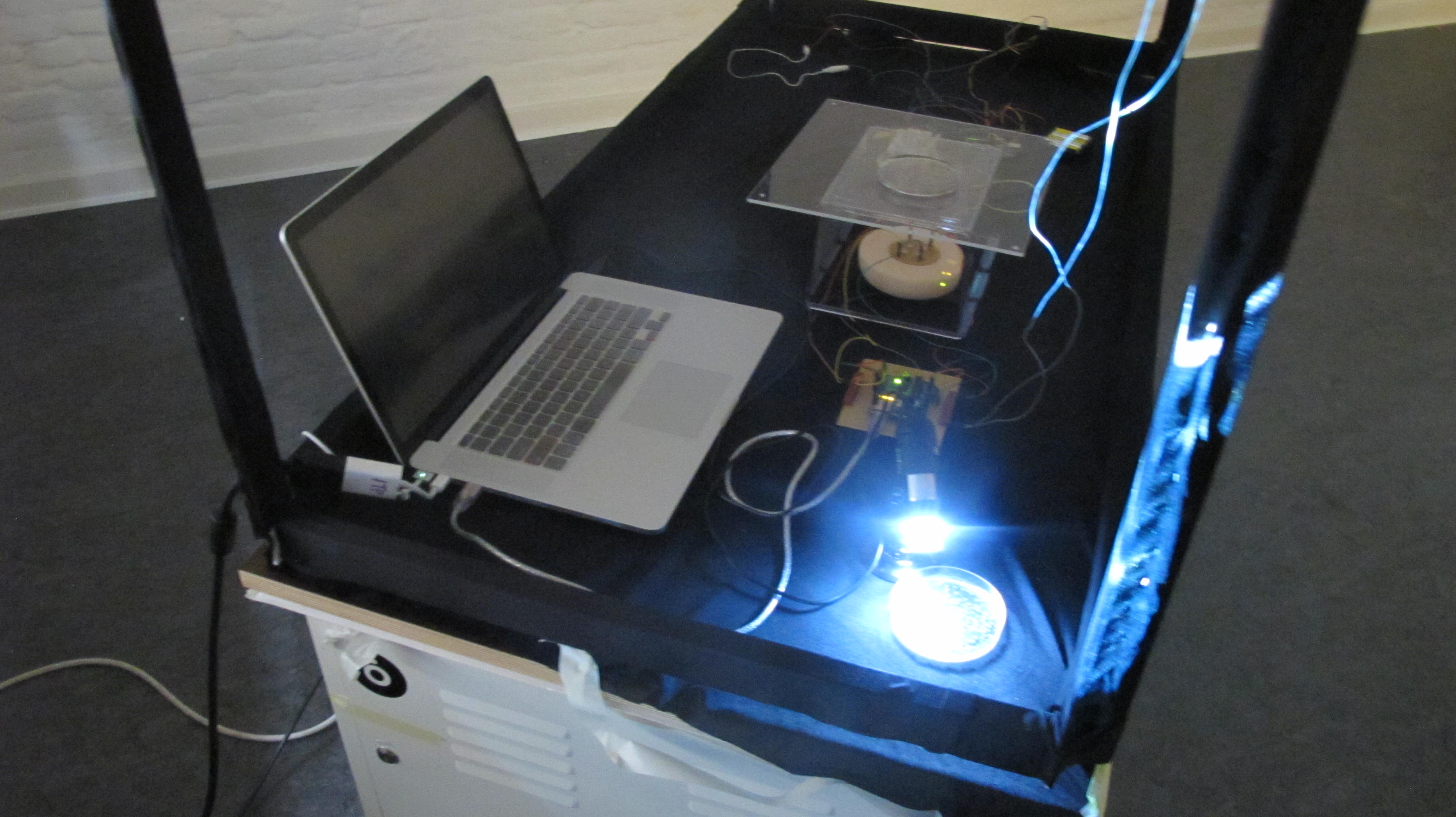
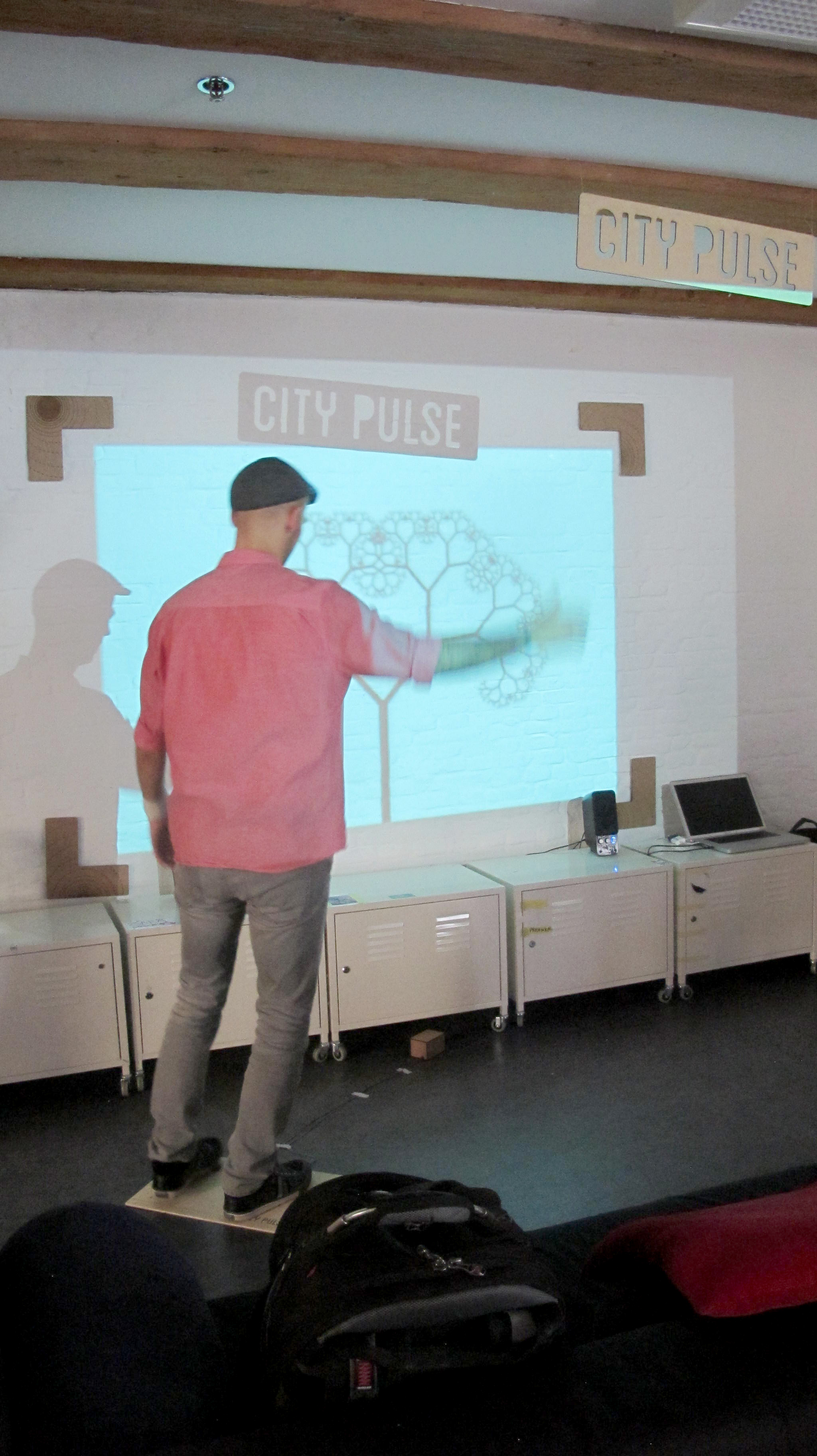
City Pulse, a final project in the summer course, a data-driven real-time interactive projection based on the people’s motion
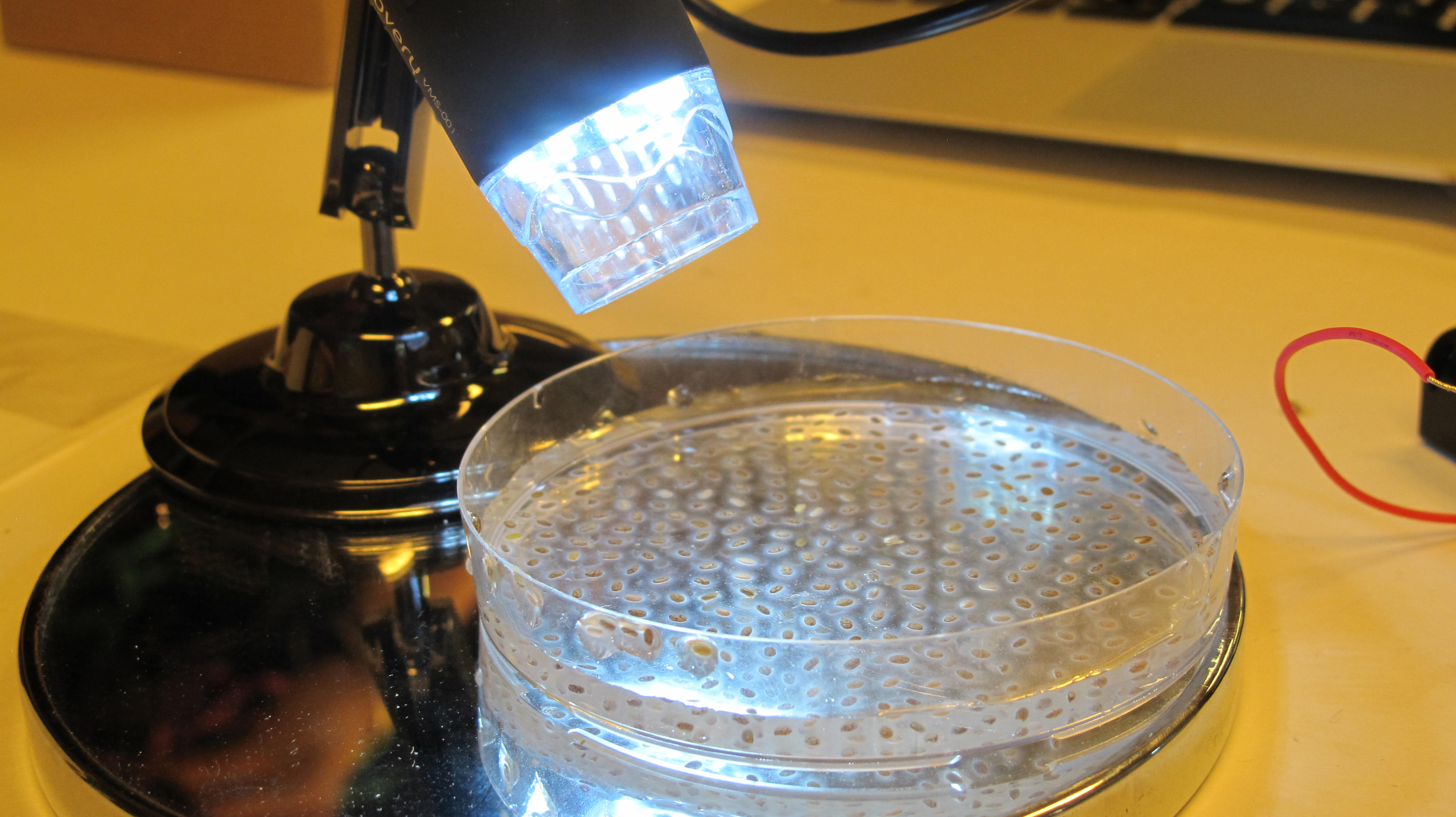
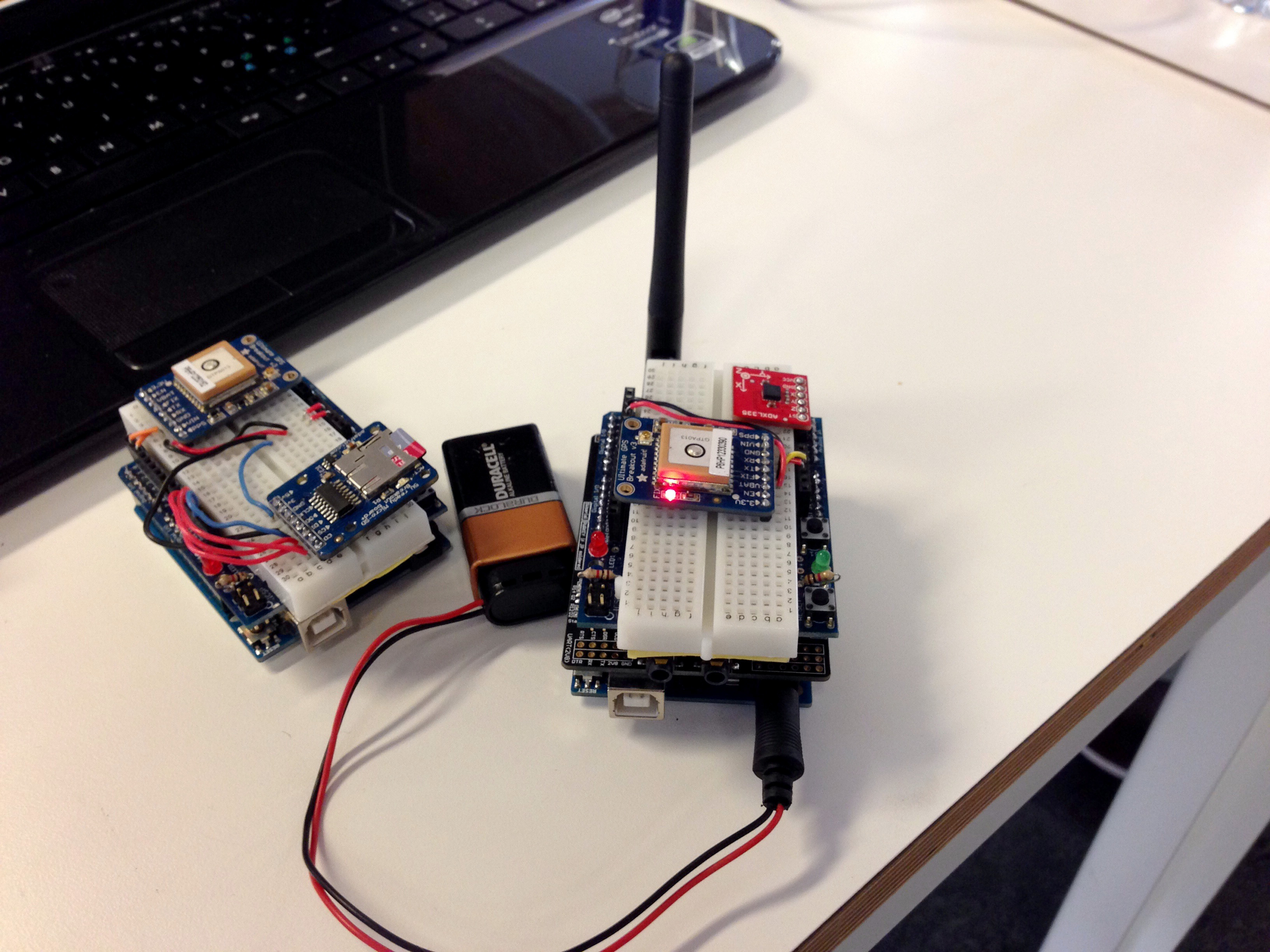
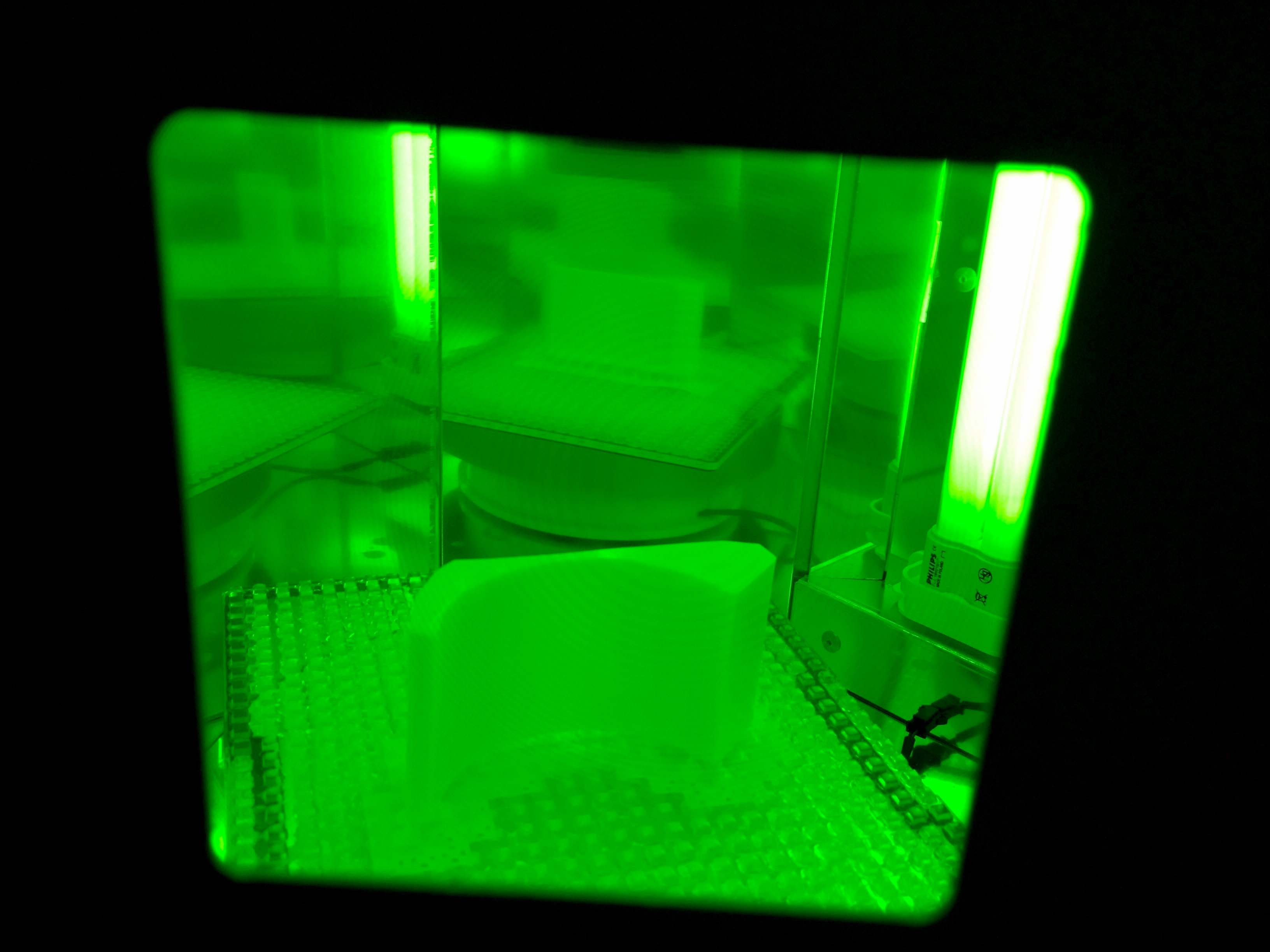
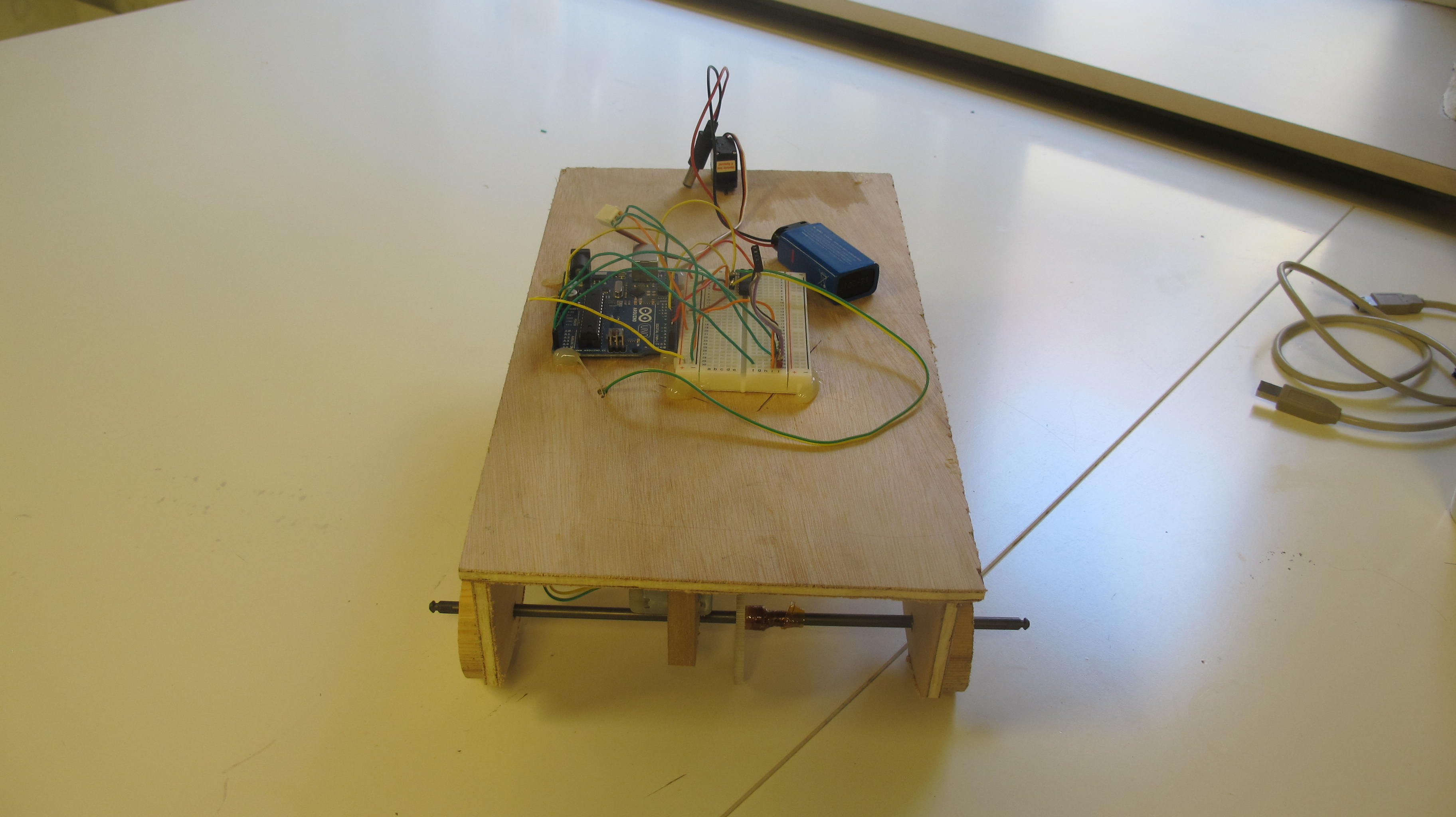
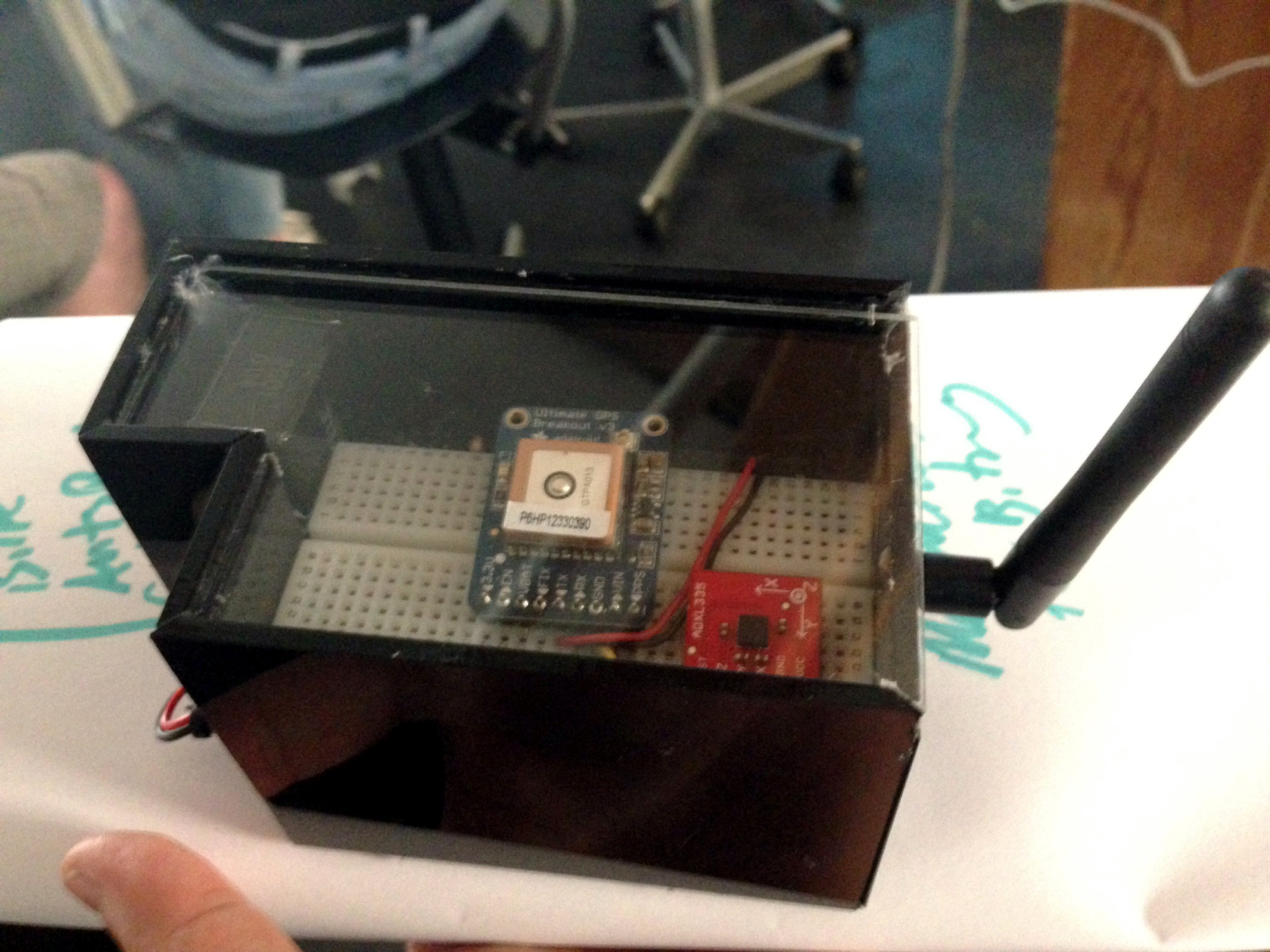
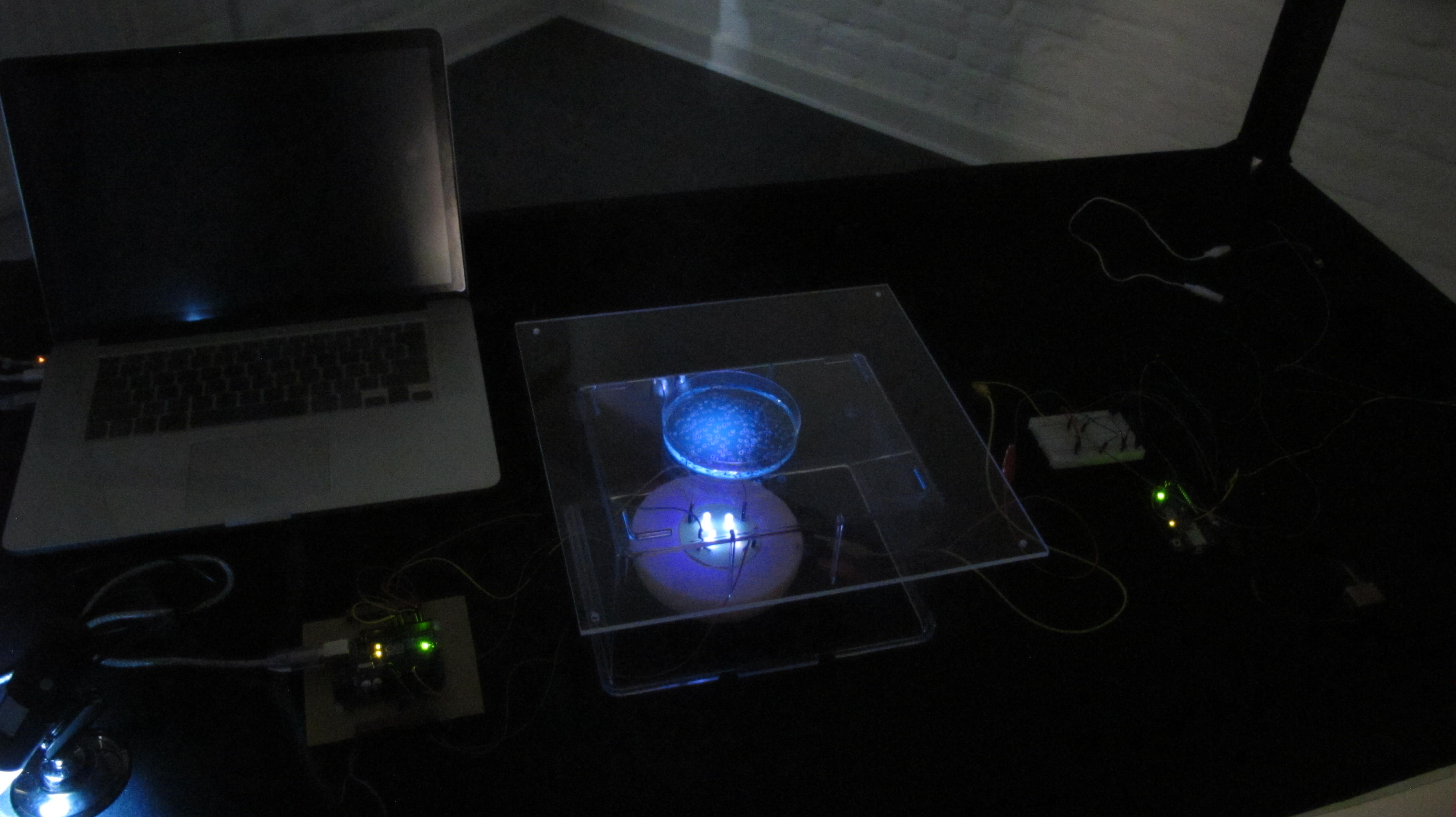
This rapid innovation is possible when communities and individuals willingly donate R&D online, making available modular code libraries and hardware toolkits for affordable prices. Through open source sensor distributors, like Sparkfun and Adafruit, the prices of the sensors, (ie for temperature, humidity, acceleration, barometric pressure) are super affordable ($10 – $30USD). In just two weeks, people who had never built electronic circuits, never programmed a microcontroller in the programming language C, or never made real-time interactive computer graphics, were able to map their bike routes with GPS sensors, 3D-print prototypes to manufacture, develop a system for bacteria to harness energy based on people’s twitter feeds, design reactive screen based projections based on sensor data from people’s motion, and prototype robots to collect trash.
Explore more about the class here.
Sources Cited:
[1]http://freedomdefined.org/OSHW
[2]http://www.nytimes.com/2013/07/17/education/barrage-of-cyberattacks-challenges-campus-culture.html
[3]http://www.nytimes.com/2013/05/23/world/asia/in-china-hacking-has-widespread-acceptance.html
[4] http://patterns.ideo.com/issue/shanzhai/
[5] http://uk.finance.yahoo.com/news/bandit-phone-king-has-the-last-laugh-ftimes-34bef9cc11fc.html
[6] http://ciid.dk/education/summer-school/ciid-summer-school-2013/biomimetic-interfaces/
Teaching at CIID Summer Course 2013: Exploring Biomimetic Interfaces
I just returned from teaching a 2 week summer session course at CIID
It is an amazing place. And it was an intense and fantastic 2 weeks. It was a mix of Human – Based Design Thinking, Biomimetic practices, Programming, creative ideas, interactivity, and stacks of Arduinos. To see some of the course work see this site.
We arrived the first day:  and went to the school.
and went to the school.
We explored the lab and the equipment. They have a VERSA laser cutter, 3d printer, electronics bench, a woodshop, and a lot of spare materials.



From there we head to the apartment and wandered the stairs until we were able to find the right apartment 
d


We got our bikes!
And the course began
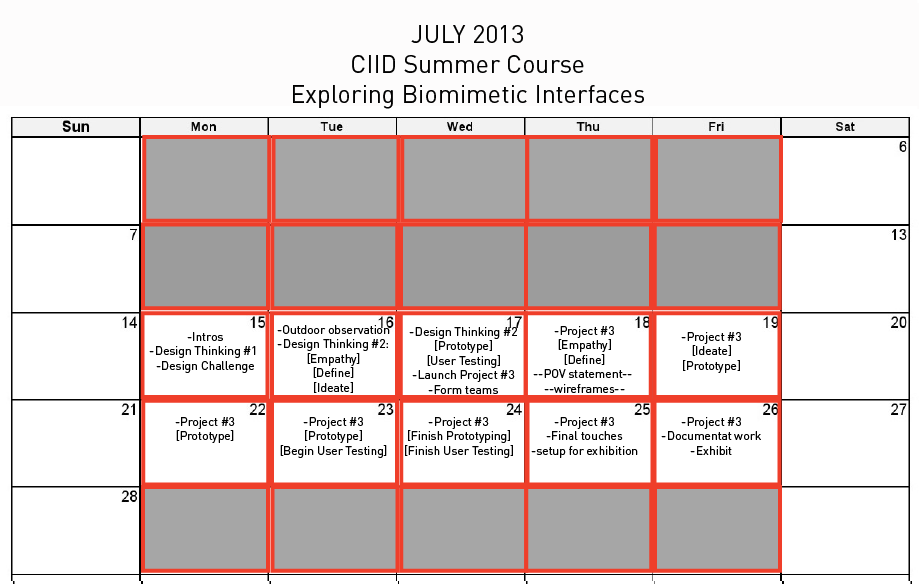
The first day of class:
Design Challenge: raft lanterns


Design Thinking Crash Course : redesign the playground


Day 2: Arduino Intro and lab #1. hardcore hands on.
And assignment #1: Design solution from the perspective of a non human user


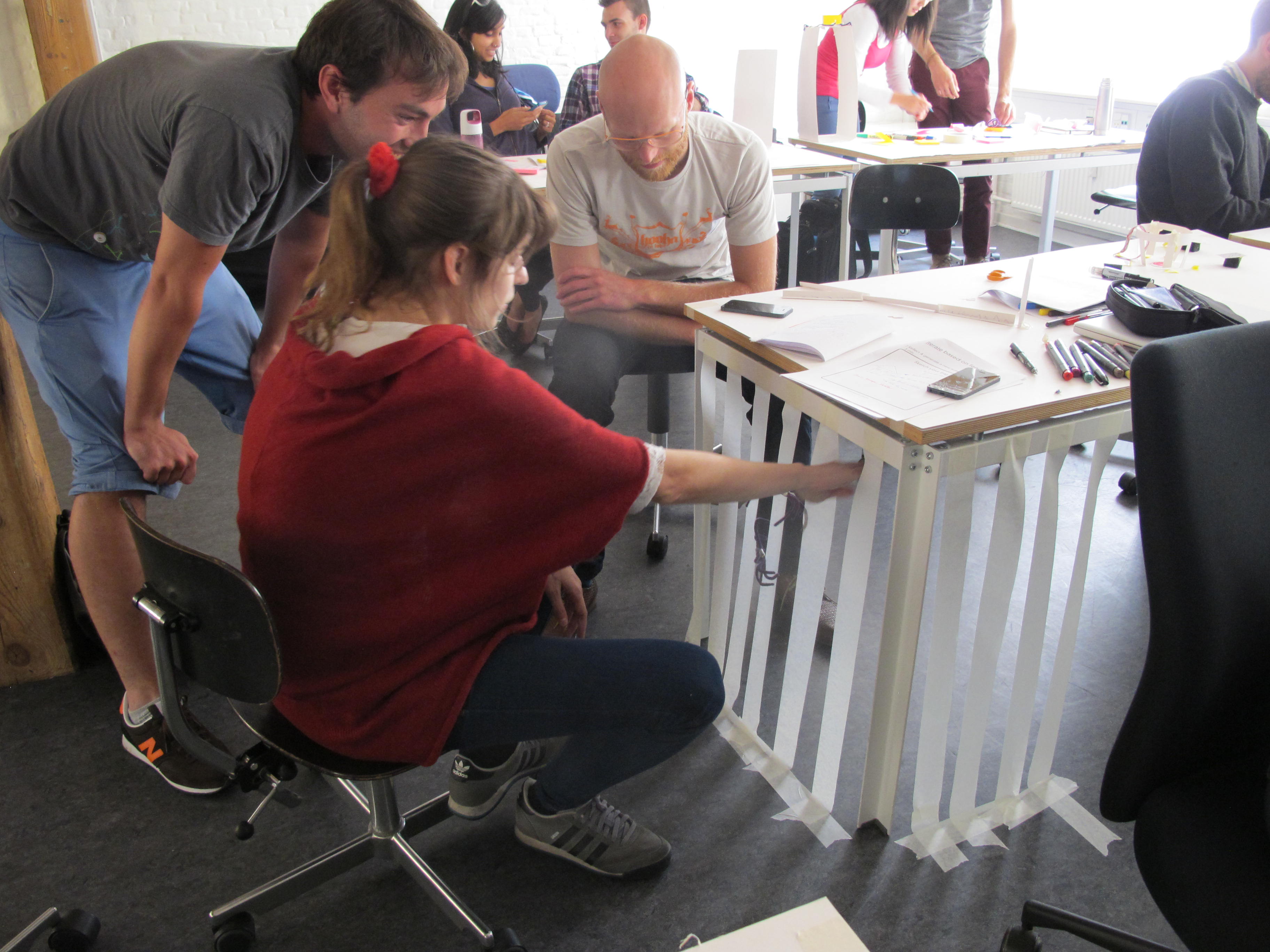
By day 3 already, we were planning for the final project and doing some analog user testing:



and analog fabrication, building, designing, planting, creating, conceiving, etc



mid term presentations:

AND A LOT OF WORK, late night wine, and planning:

and some picnics and some drinks:



and fun in chrisitiania


some citi swimming:


Finally the weekend came. We biked to Louisiana to see Tara Donovan.







Then the work resumed, as the week started back up.


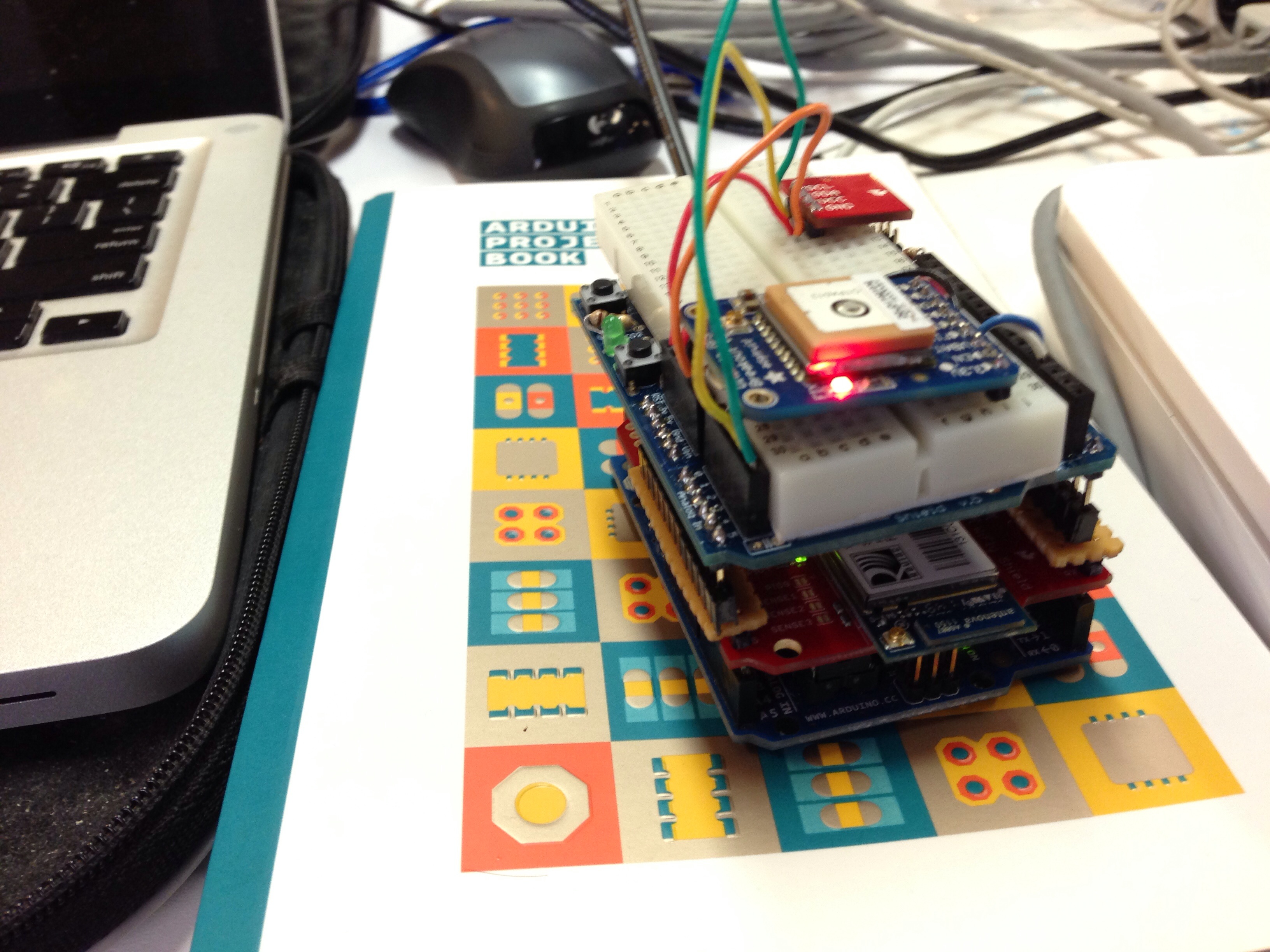
And the arduino stacks grew:
lots of late night work [it only doesn’t look dark because it got dark aroundplay 10:30 because of the long days]:


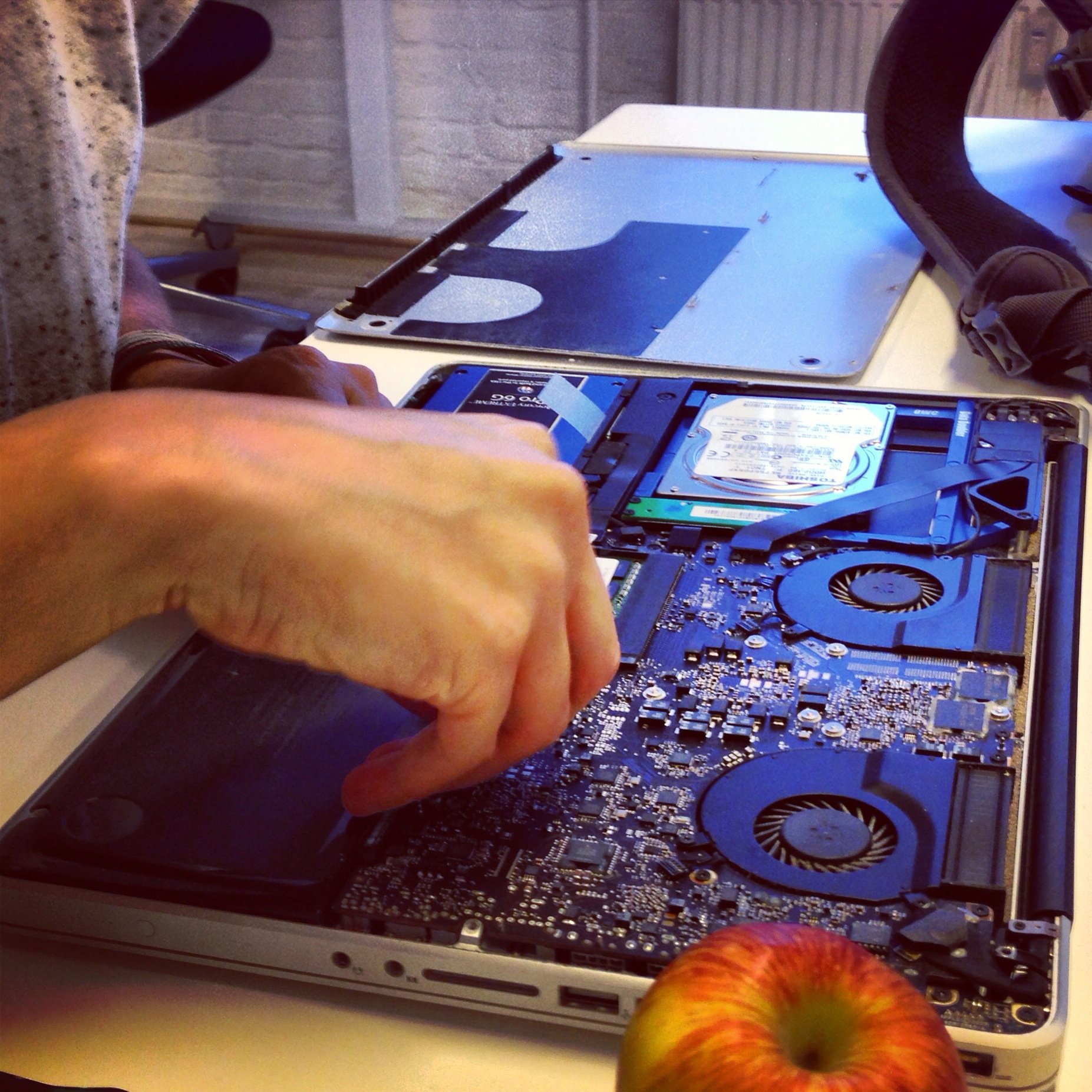
and a computer disaster disconnecting Genevieve from the rest of the world:
and a field trip to labitat:



And a long week later:
projects and presentations
METADATA : Exemplifying that unwillingly, we are all contributing to Metadata’s collection, but that can either be percieved positive or negative
THE ANTS PROJECT : encouraging recycling based on a point system modeled after ant behaviour
BIIKE – a gps tracker and data logging system to encourage biking in cities
ANTHILL – bringing sharing to mainstream with intelligent share stations setup in local supermarkets
SYMBO – a biomimetic flying trash collecting drone
CITY PULSE – Urban Data and energy contributing both to information aggregation as well as public art and compelling visualisations

And the presentations:


And FINALLY after an intense and sleepless week, the barbeque of celebration.


transnatural festival, nemo center, protei_007, oil compass and sneel_001
http://www.transnatural.nl/26
more photos here
http://www.flickr.com/photos/52250666@N02/sets/72157631486087340/



Sneel & Proteis at TEKS Meta.Morf Trondhiem
more here:
http://www.flickr.com/photos/52250666@N02/sets/72157631648083714/
http://metamorf.no/?p=275&lang=en

http://www.flickr.com/photos/52250666@N02/8044380779/in/set-72157631648083714/




























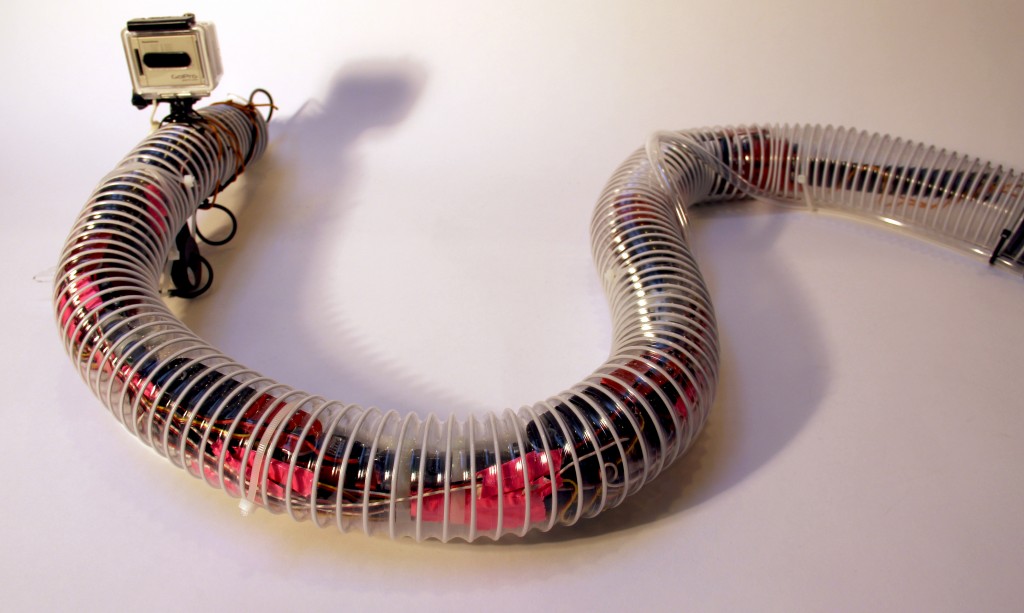


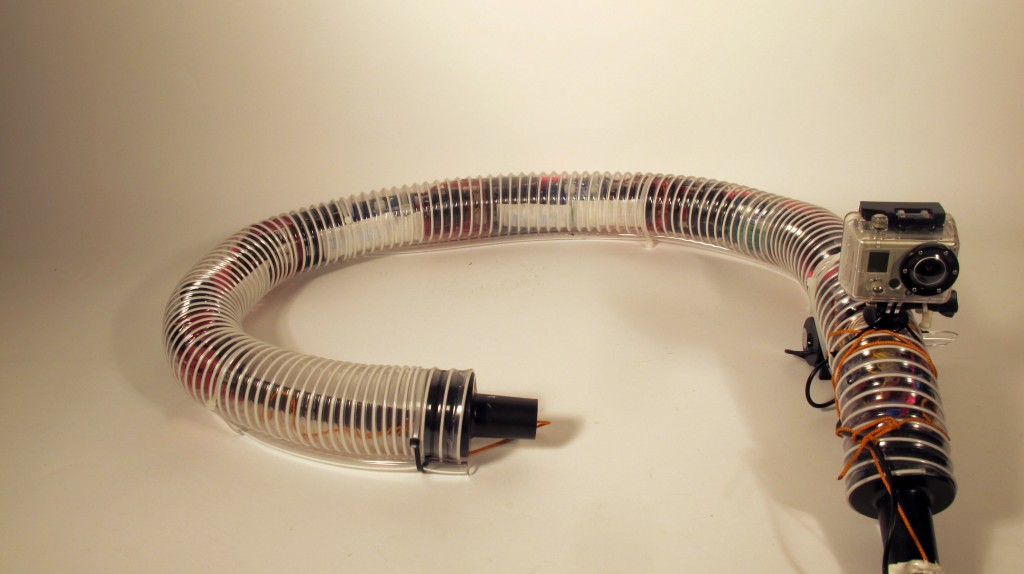


























Documentation of Sneel_002
Soon I will make a how-to guide for Sneel_002 on instructables.com, as I did for the first version of Sneel, (i’m working on that) but until then…
Sneel swam in central park

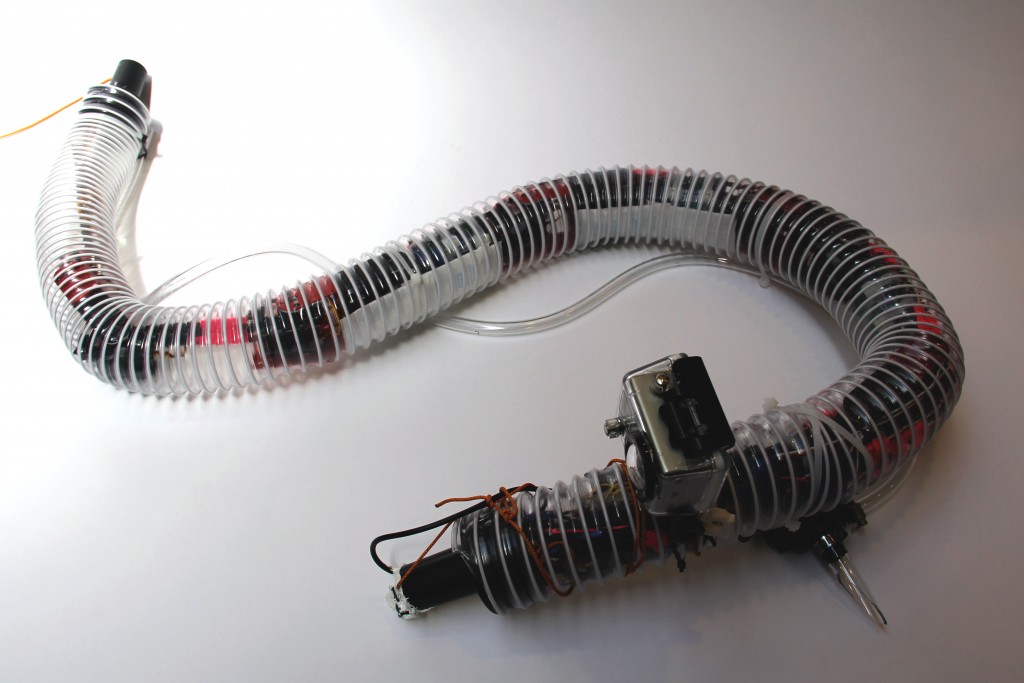
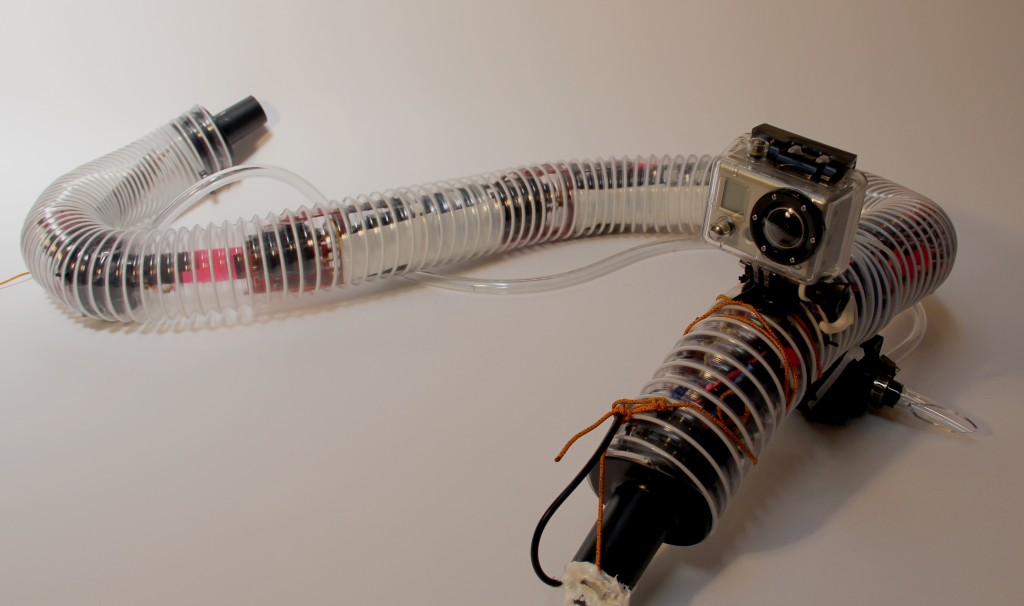
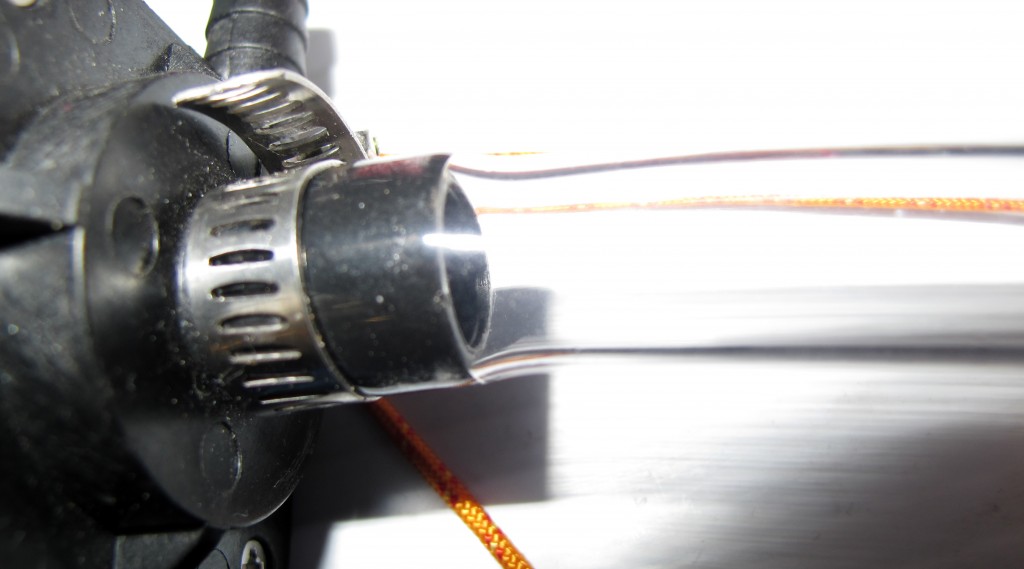
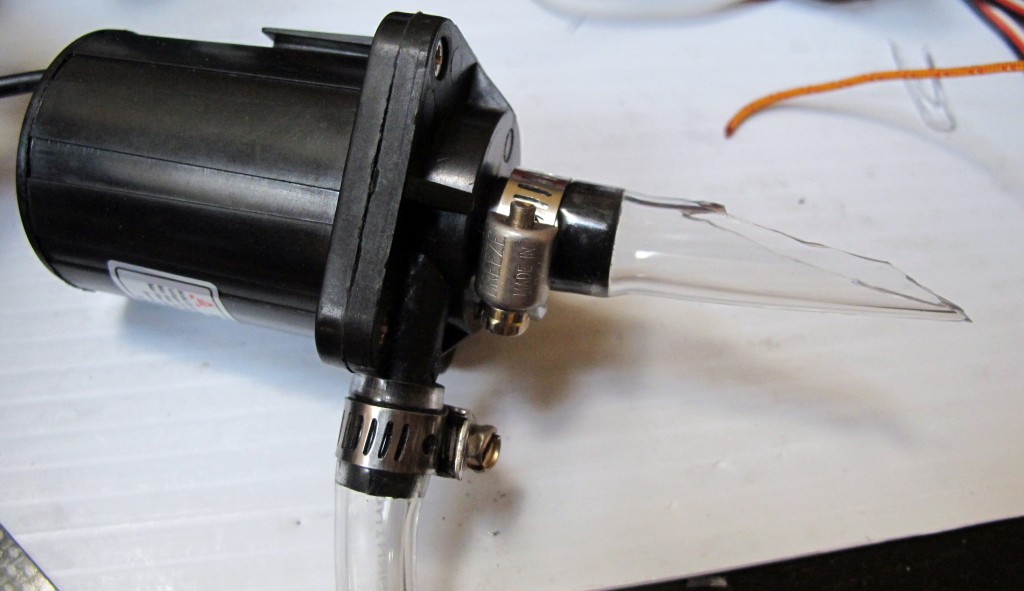
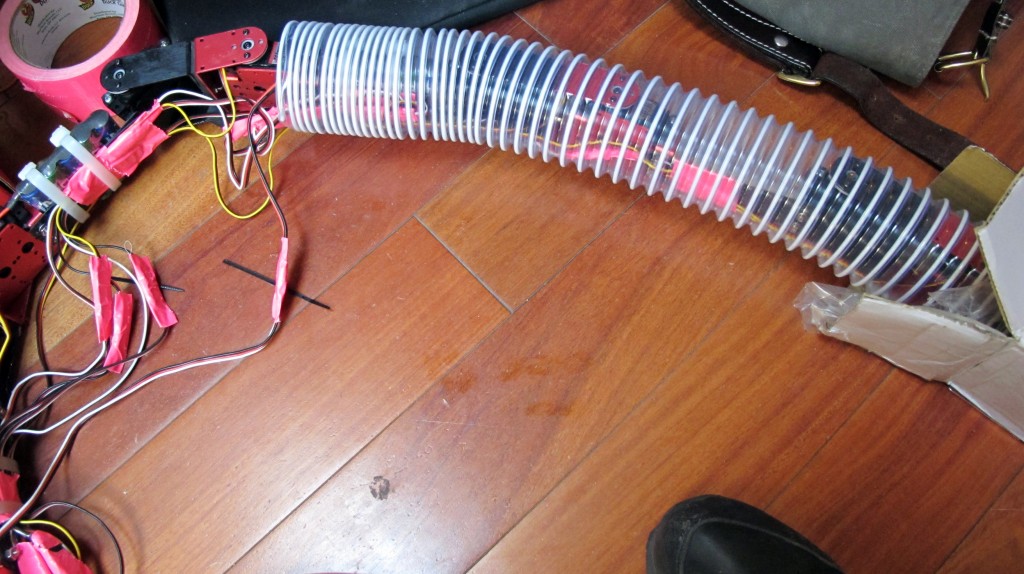
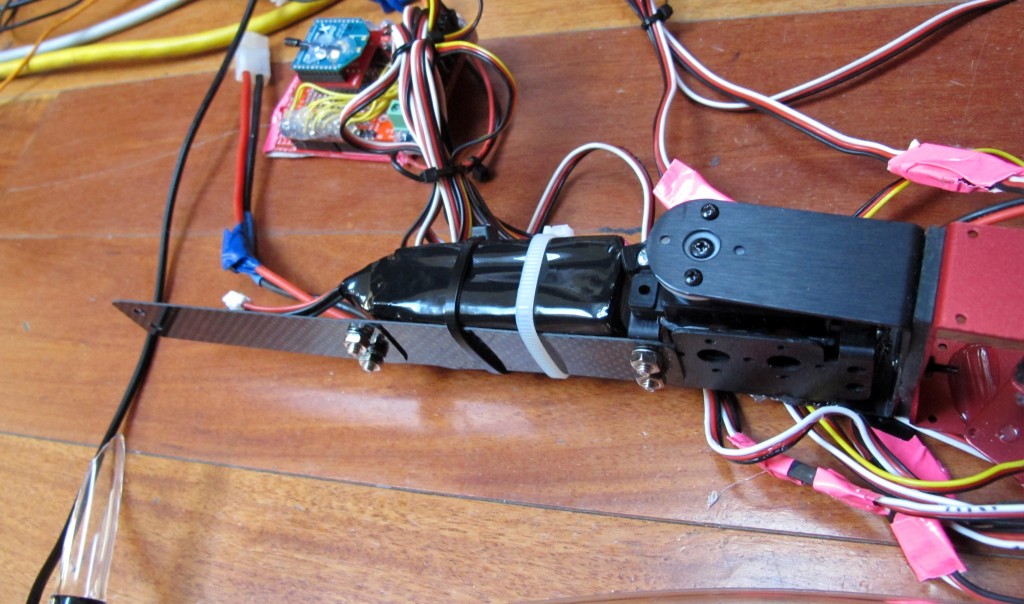
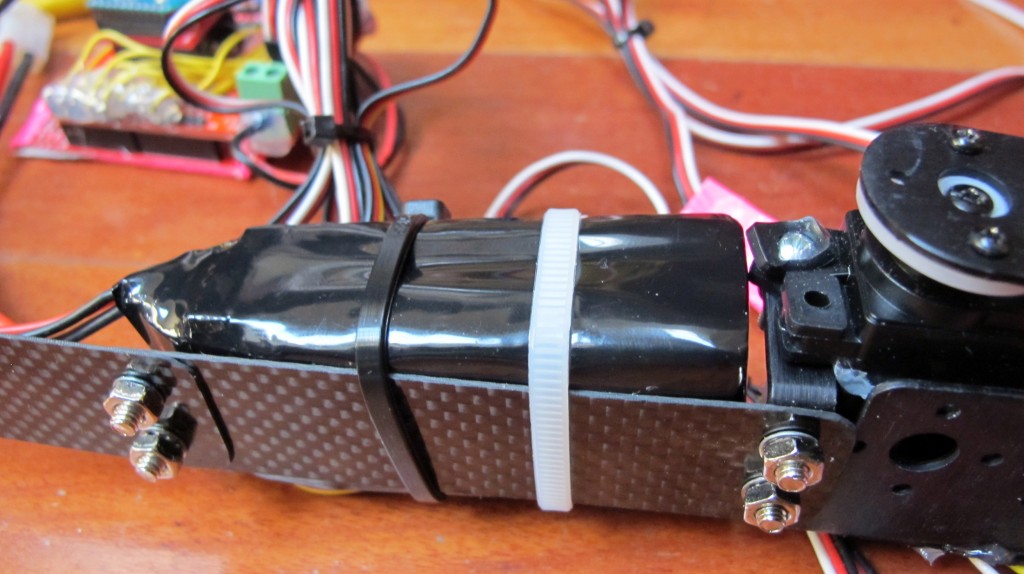
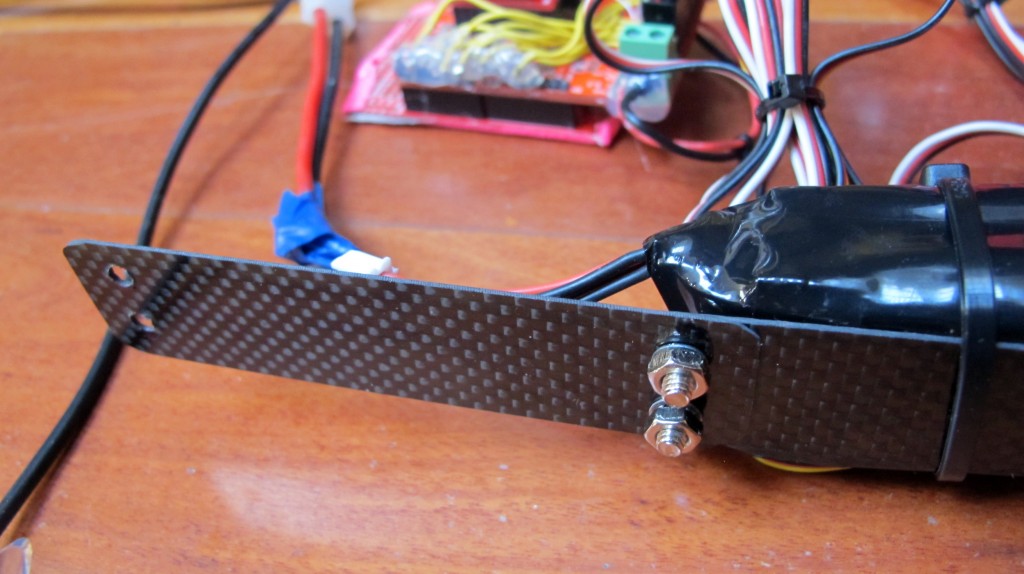
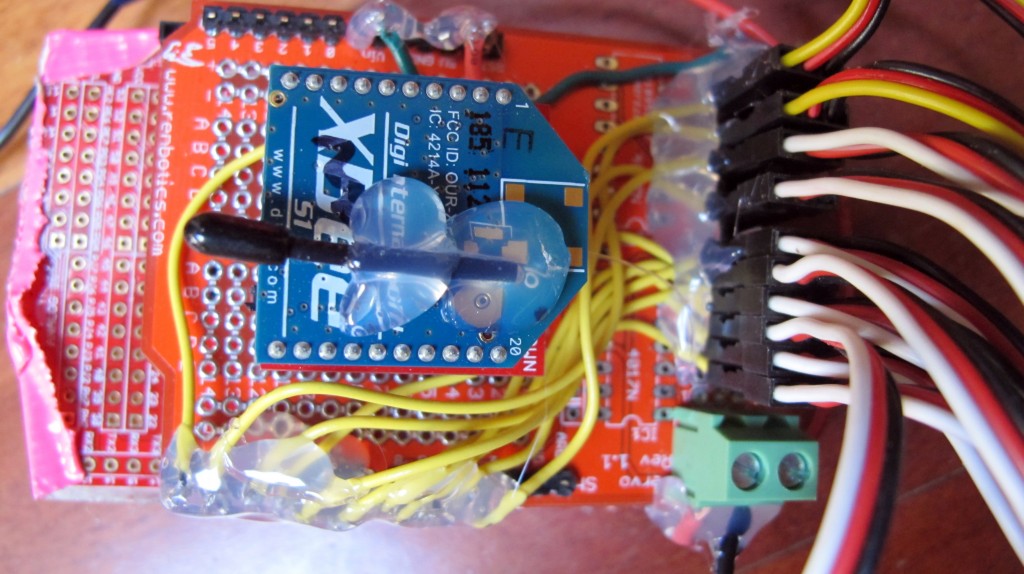
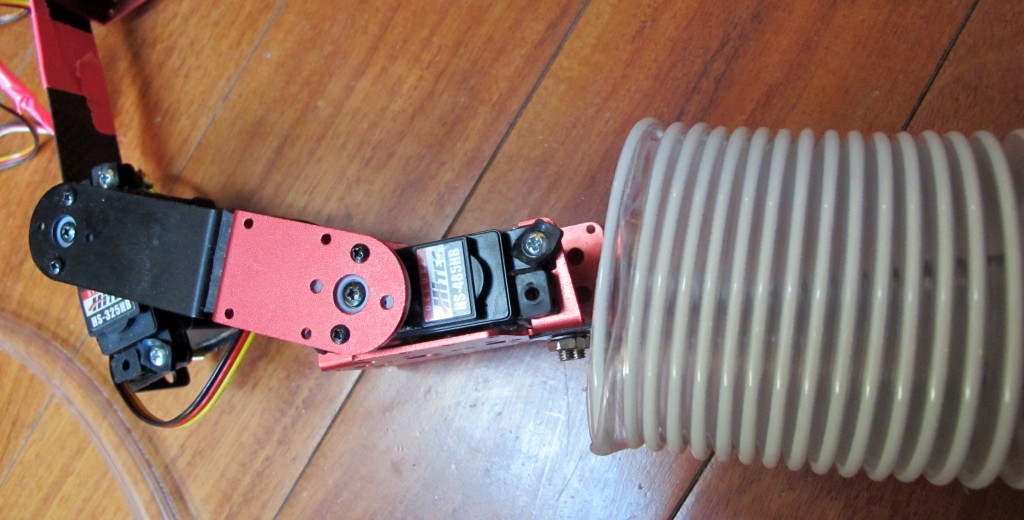
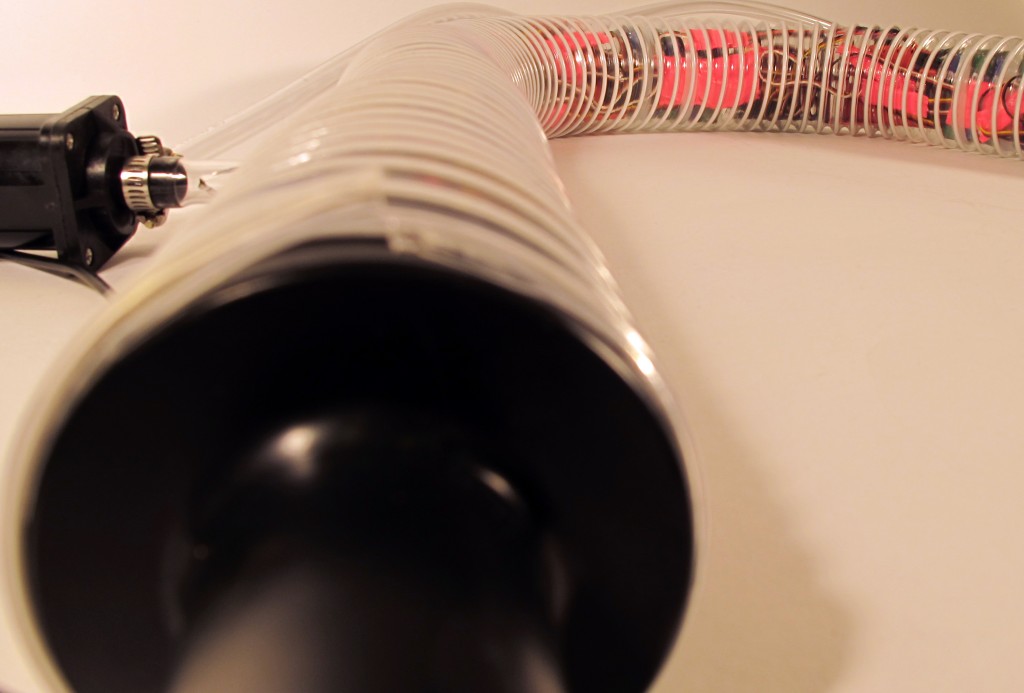
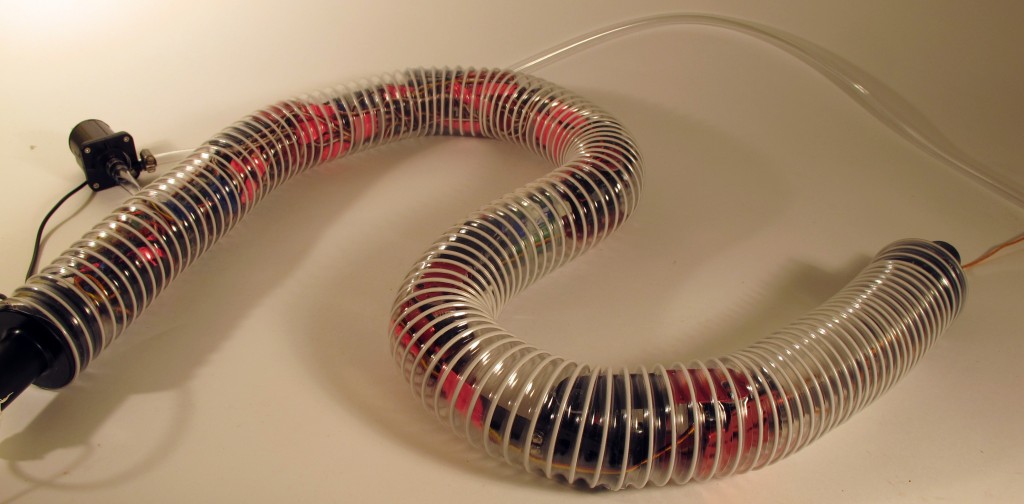
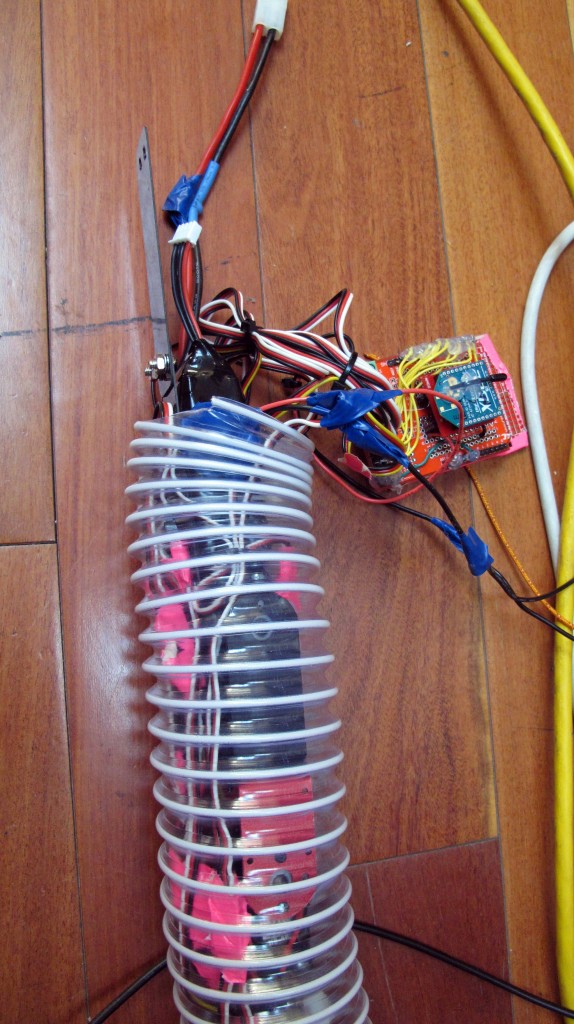
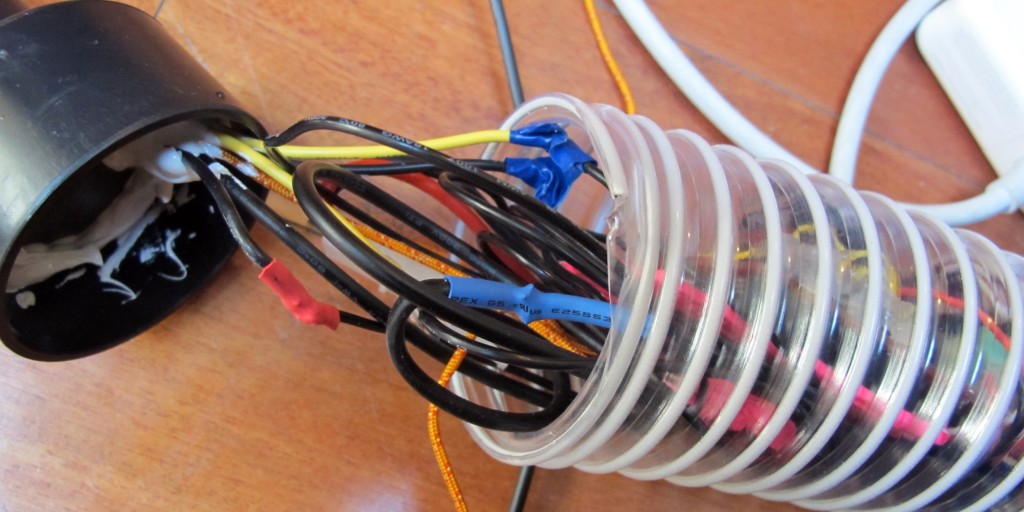
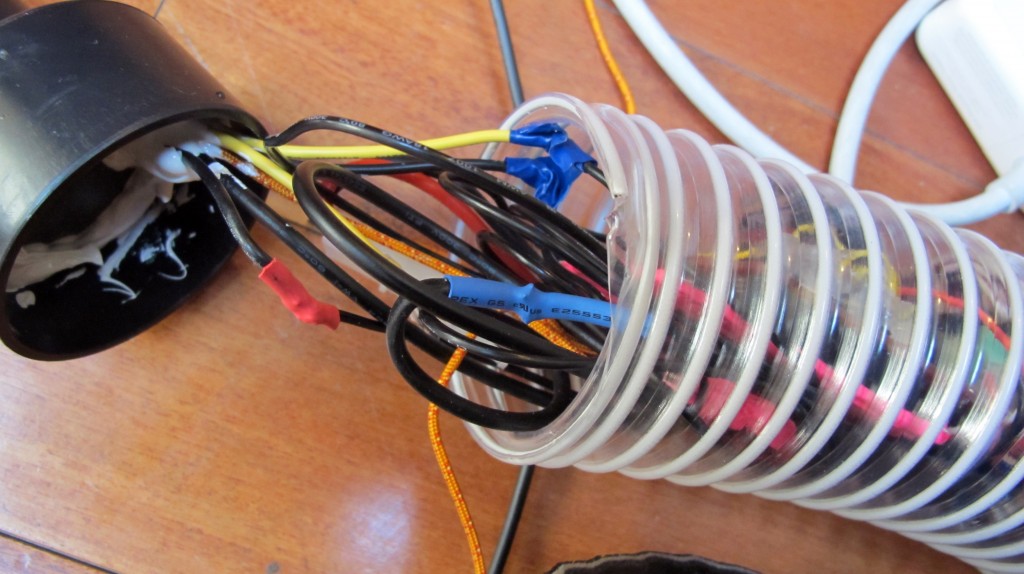
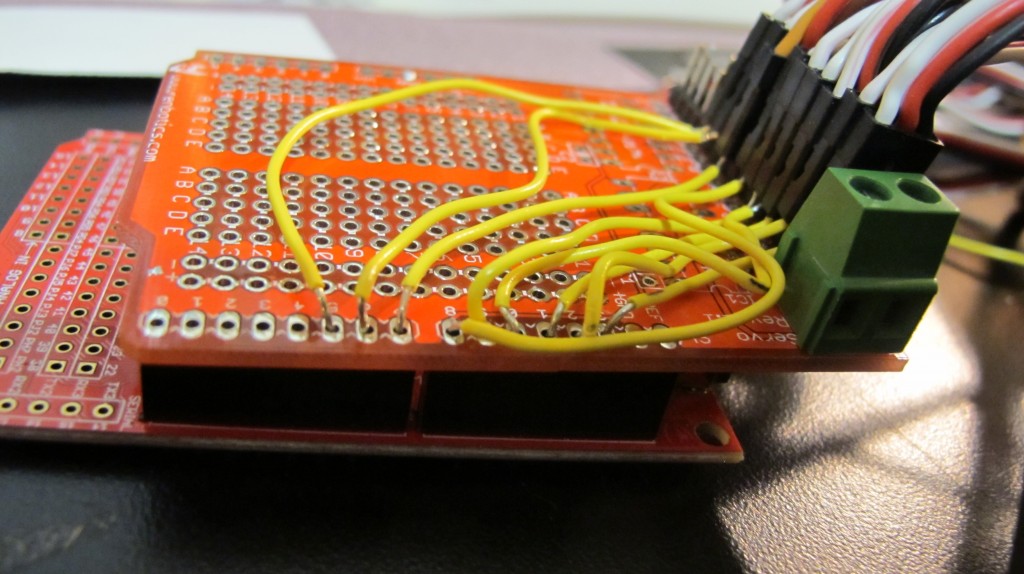
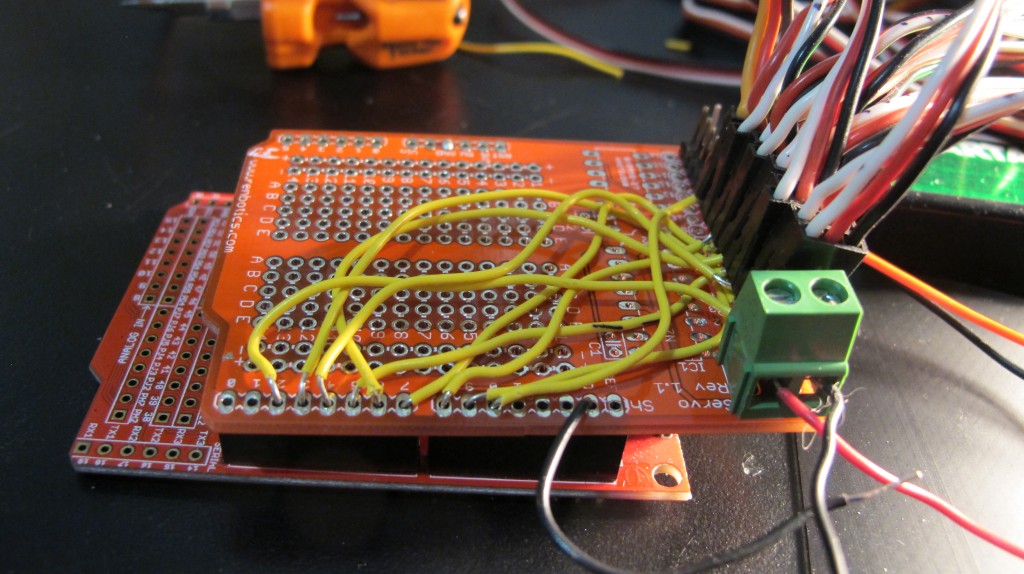
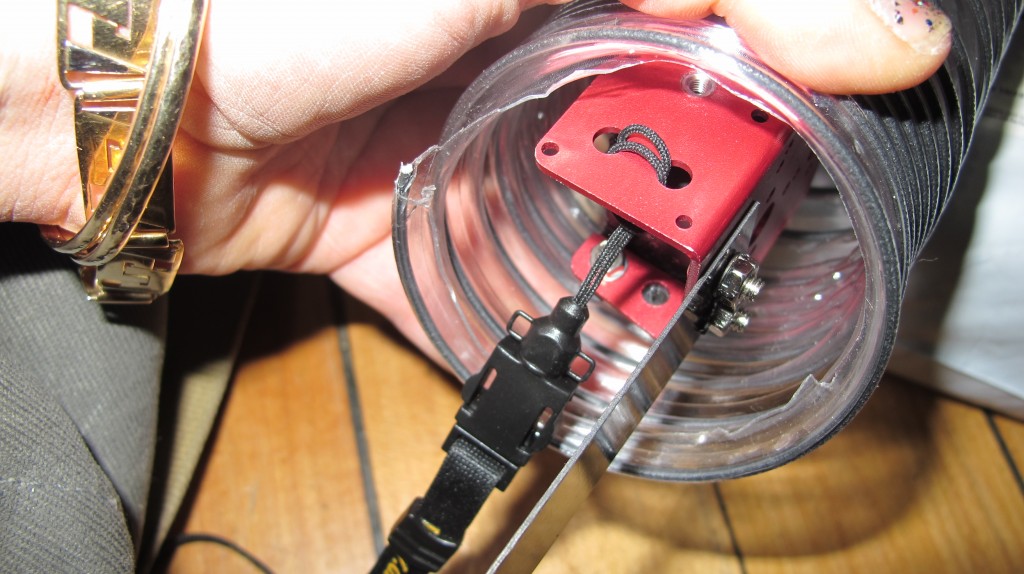
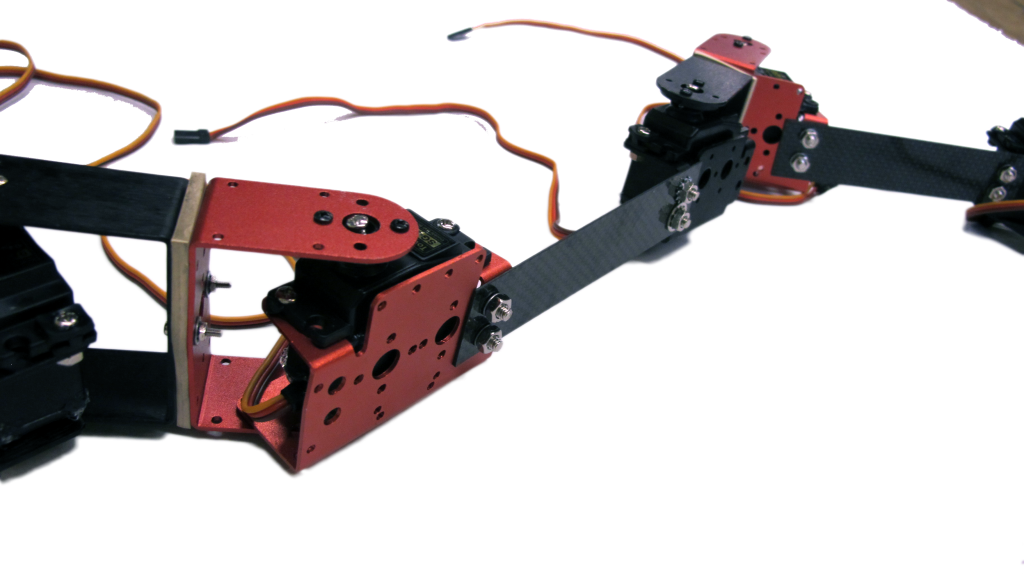
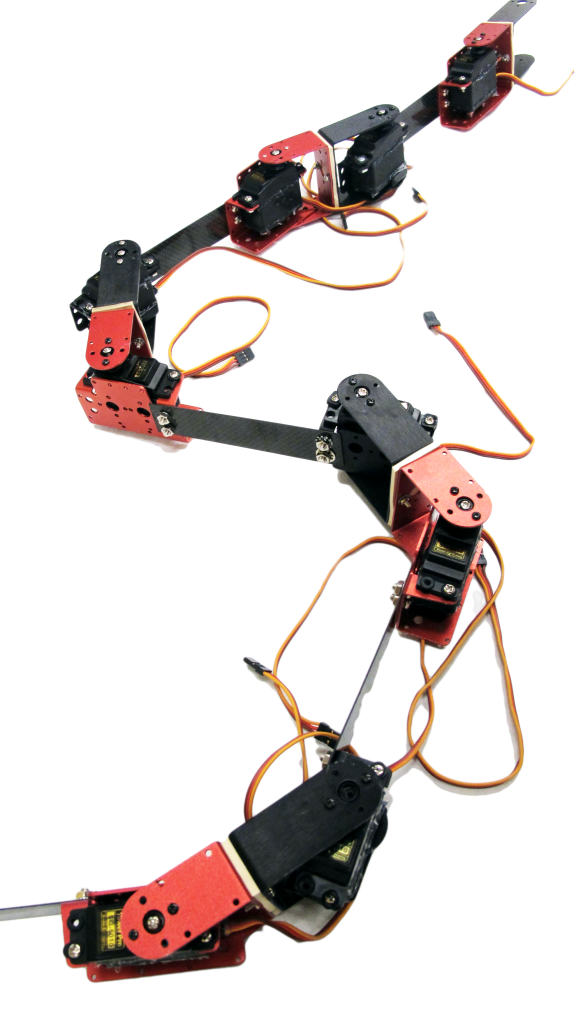
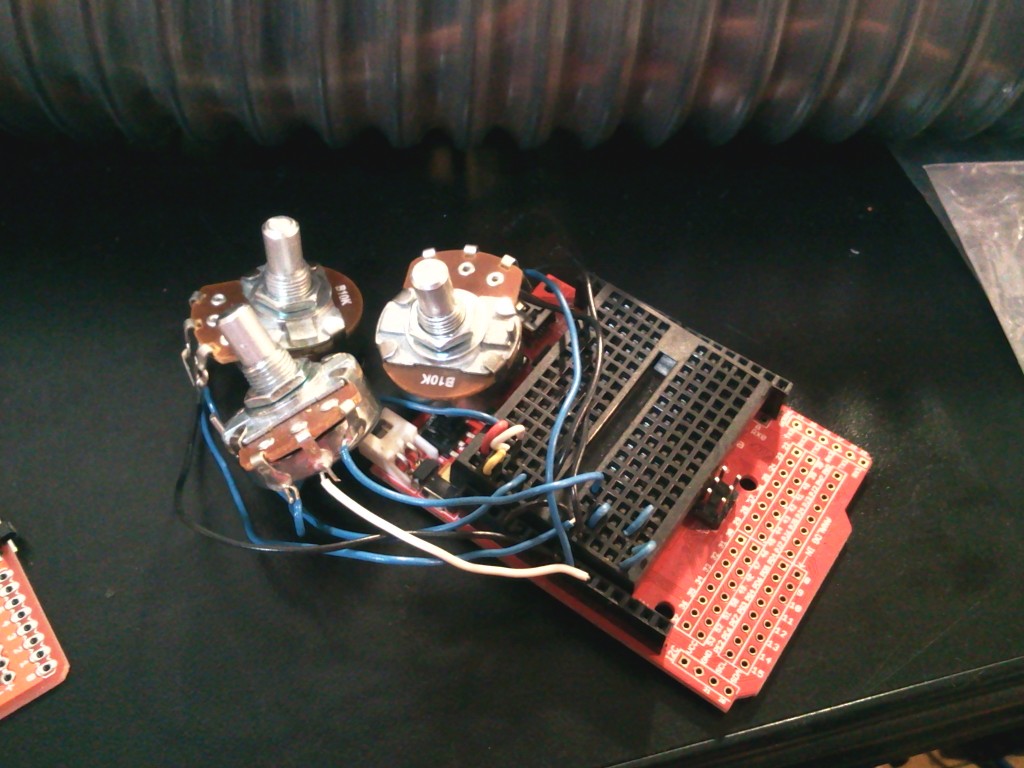
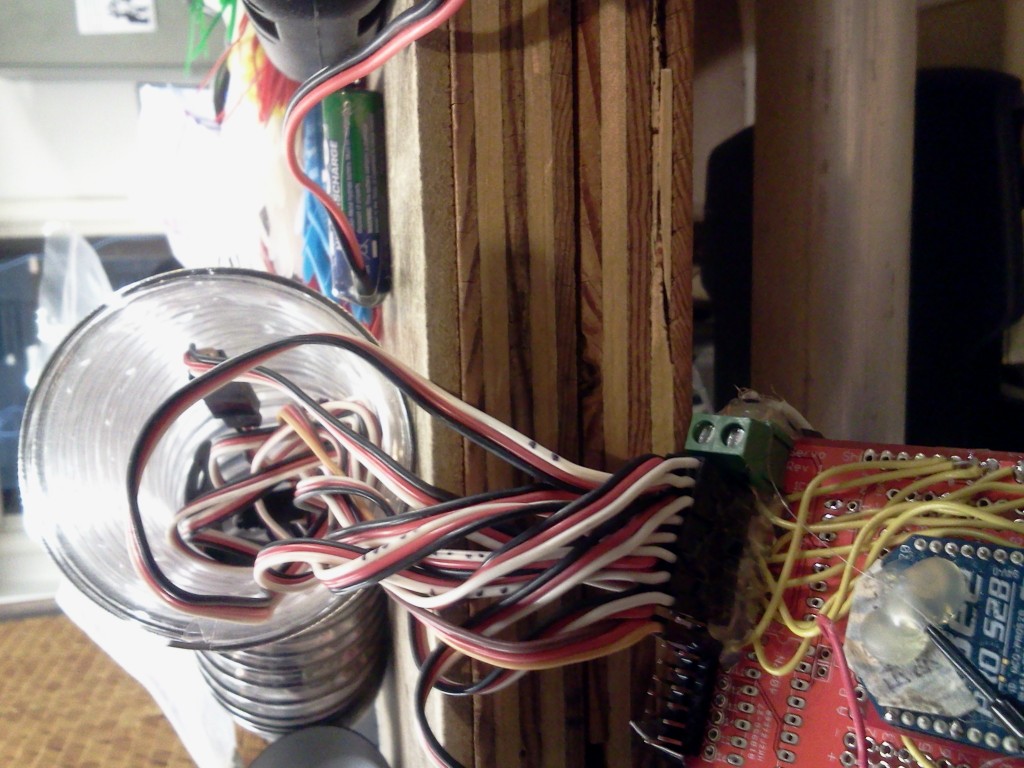
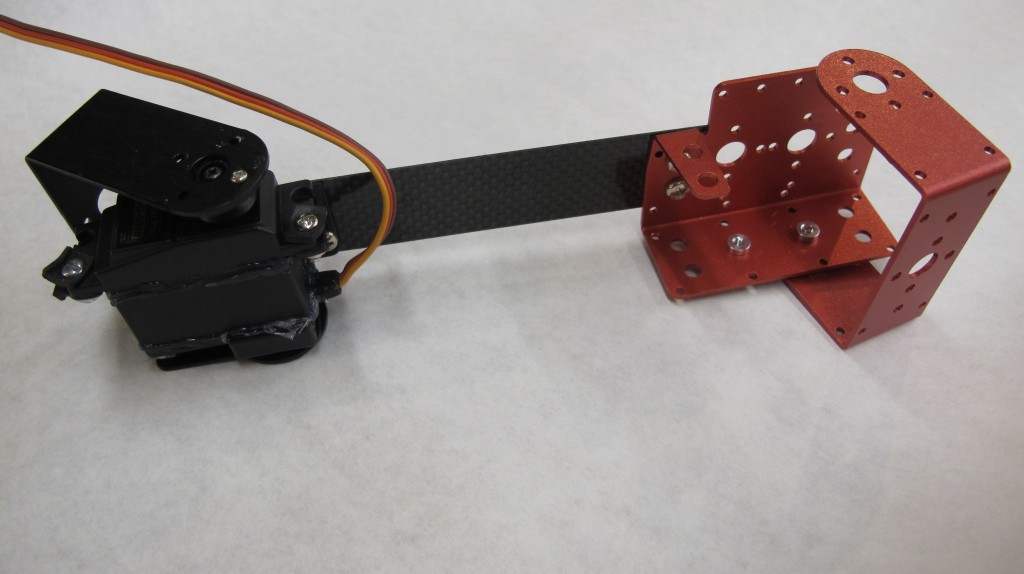
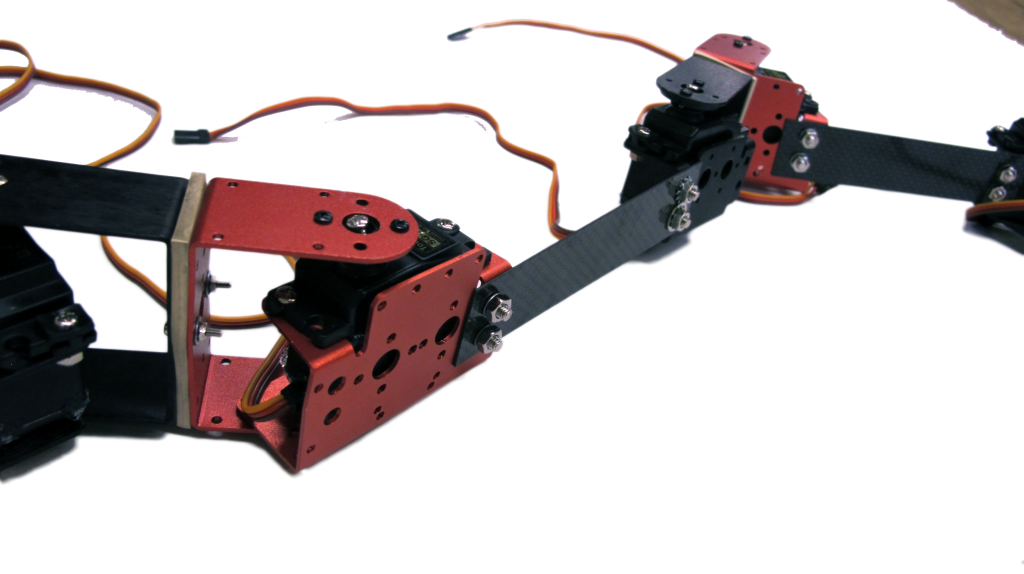
The hardware:
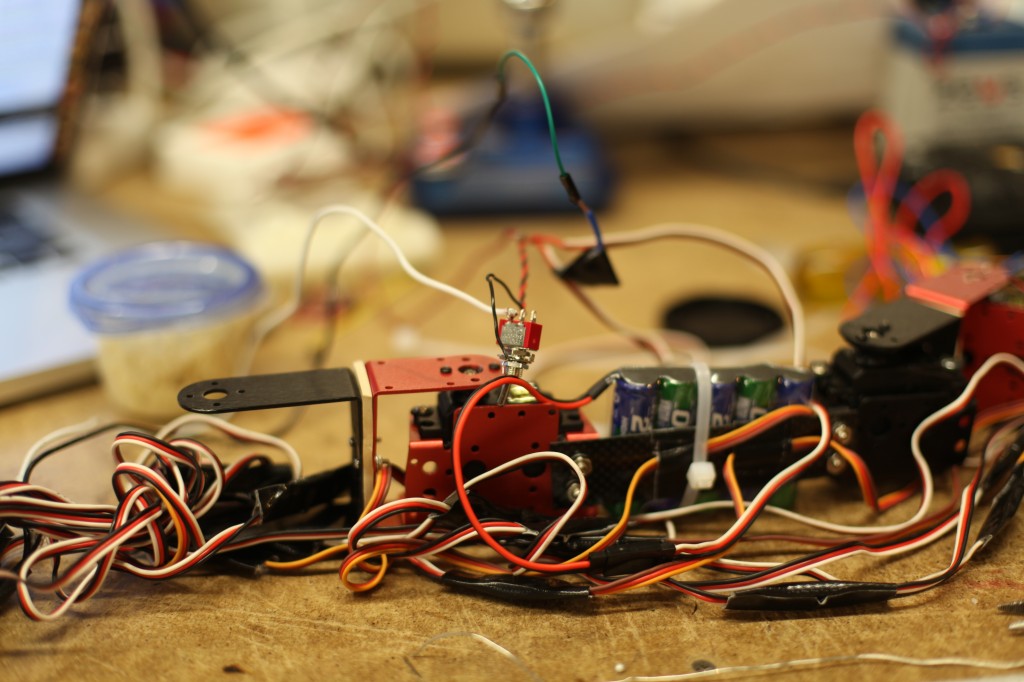
Like a real snakes vertebrates:



I used Arduino Mega with multiple servos attached, using multiple 6V NiMh battery packs, placed along the body, with an xbee mounted on top to control three parameters of wave behavior: period, wavelength, and amplitude.


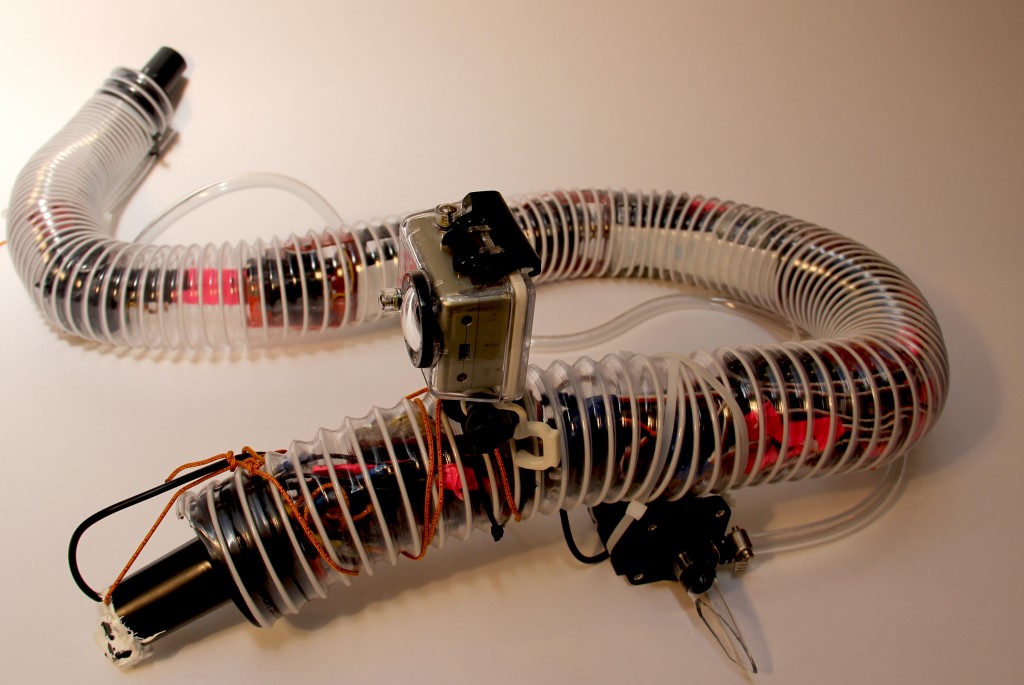
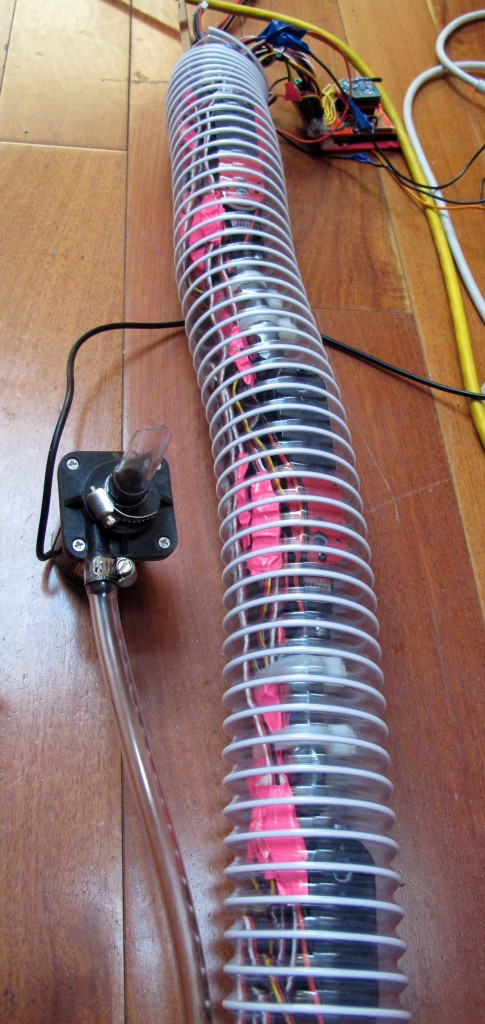
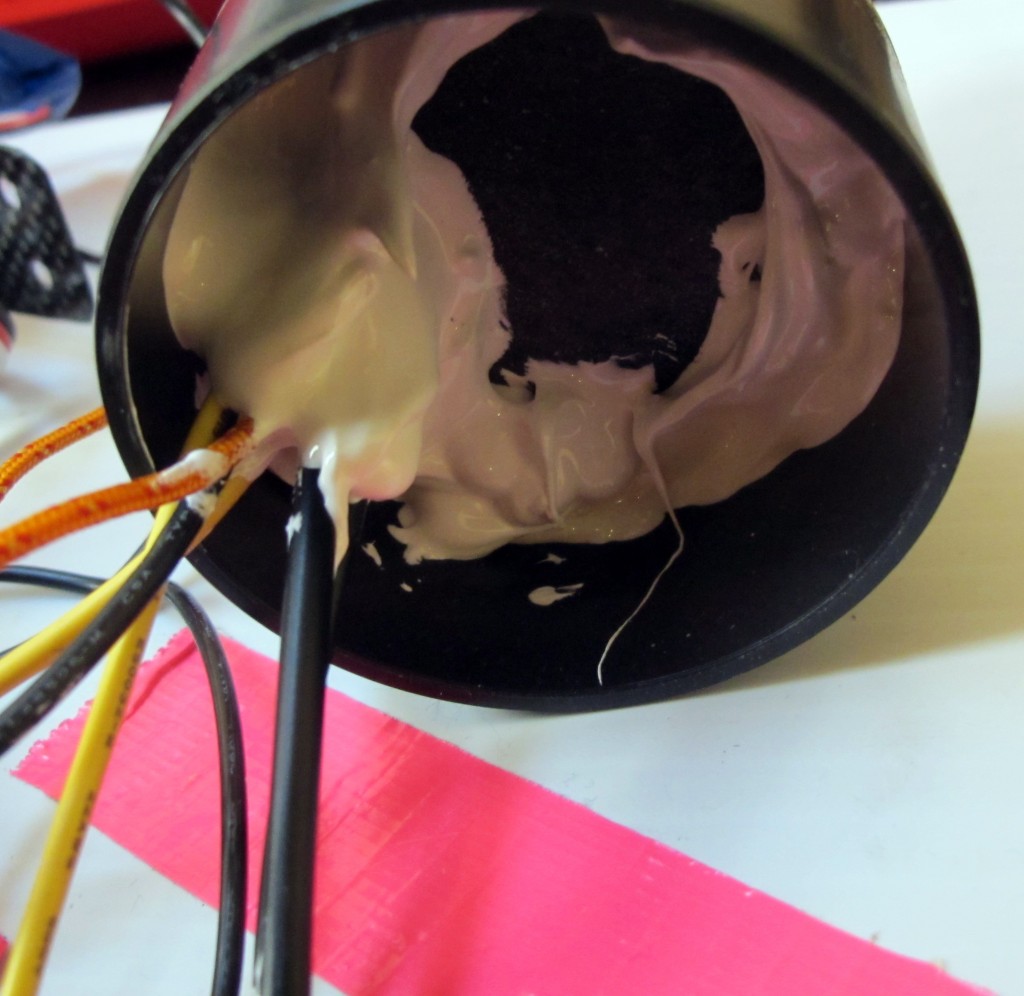
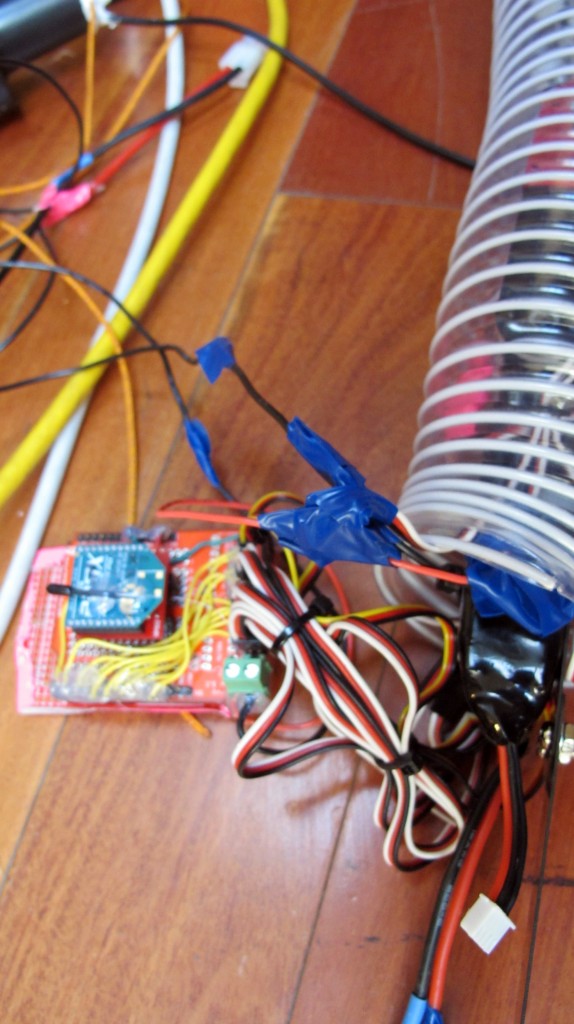
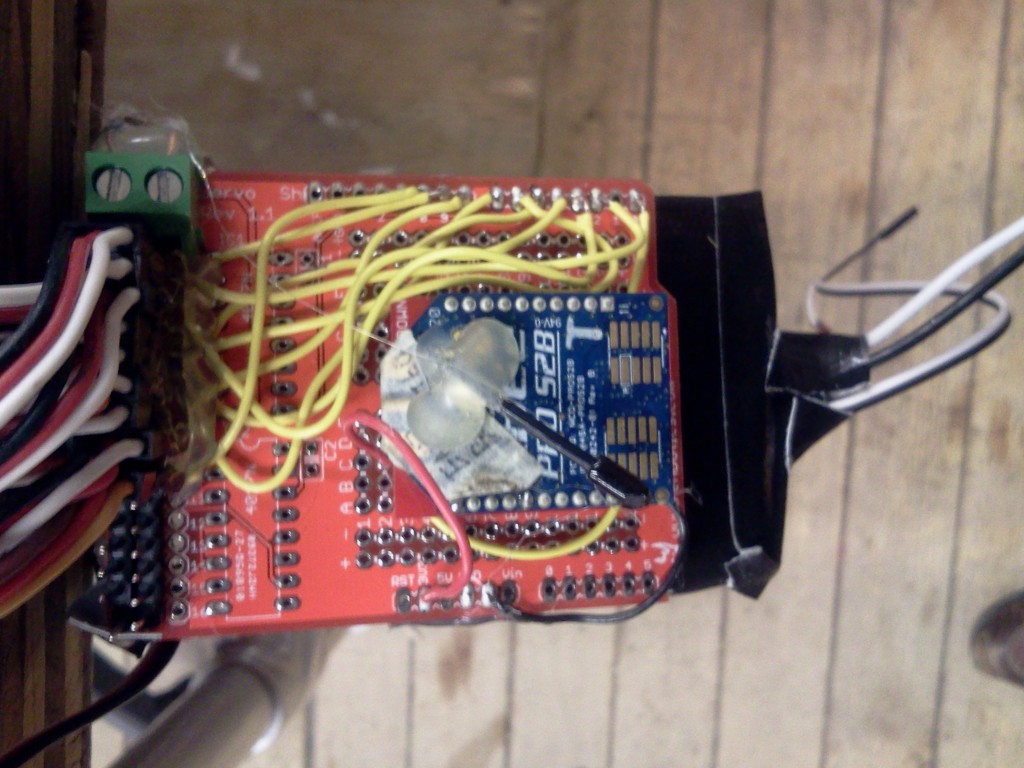
I taped the bottom of the Arduino so nothing shorted:

First I stuffed the arduino + xbee into a waterproof sac:

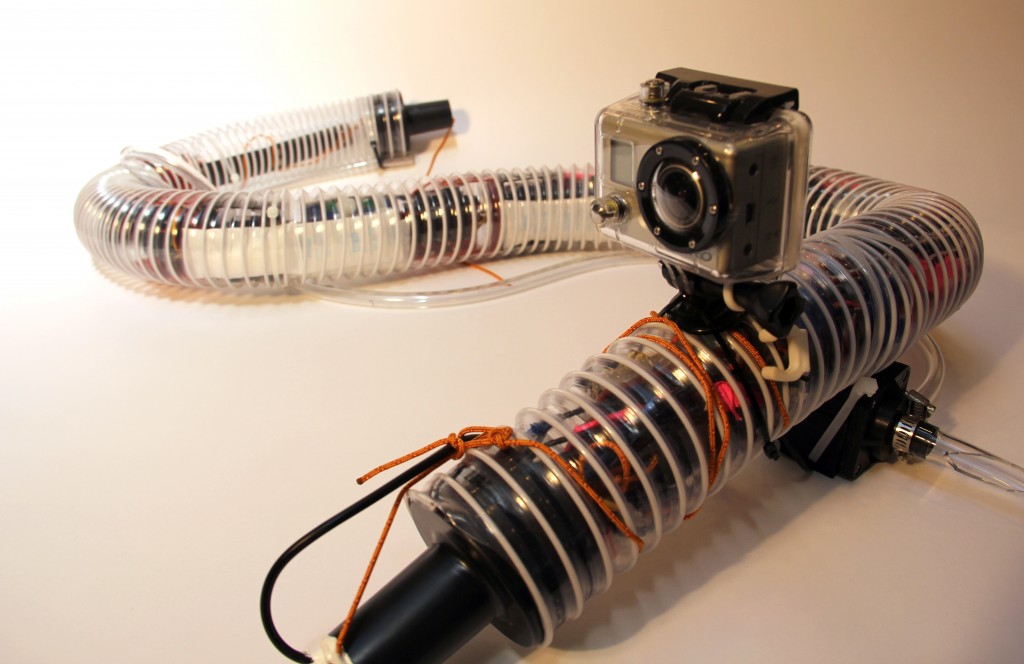
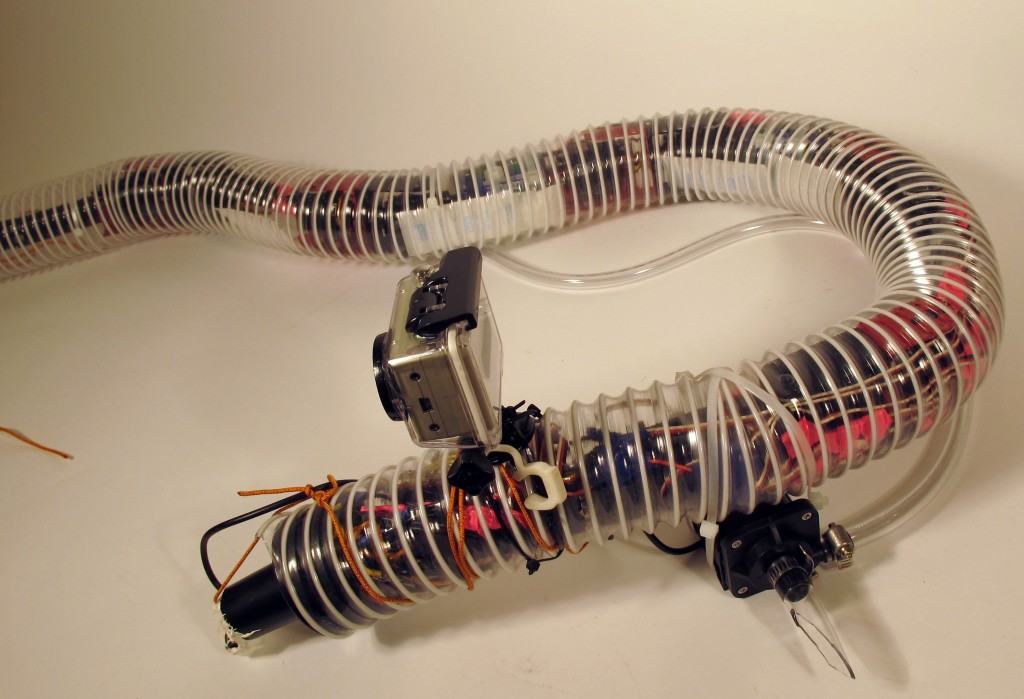
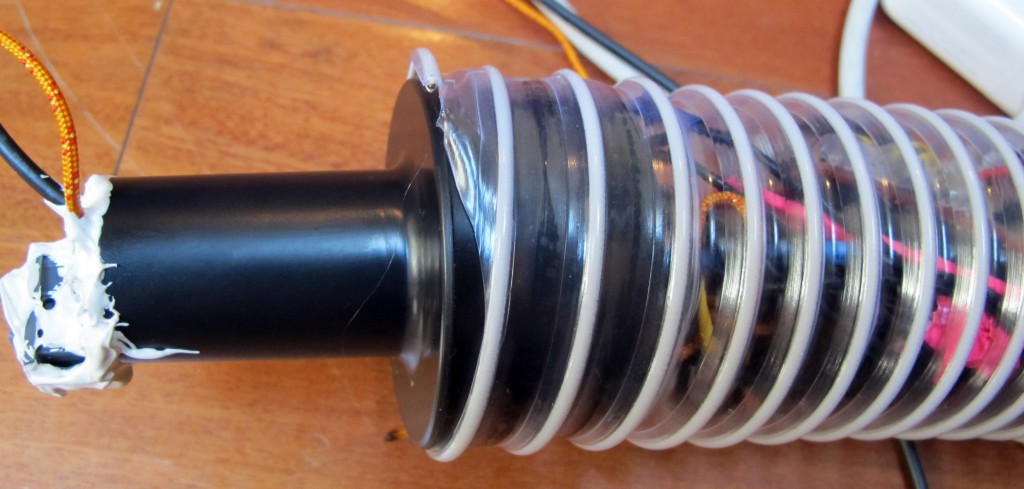
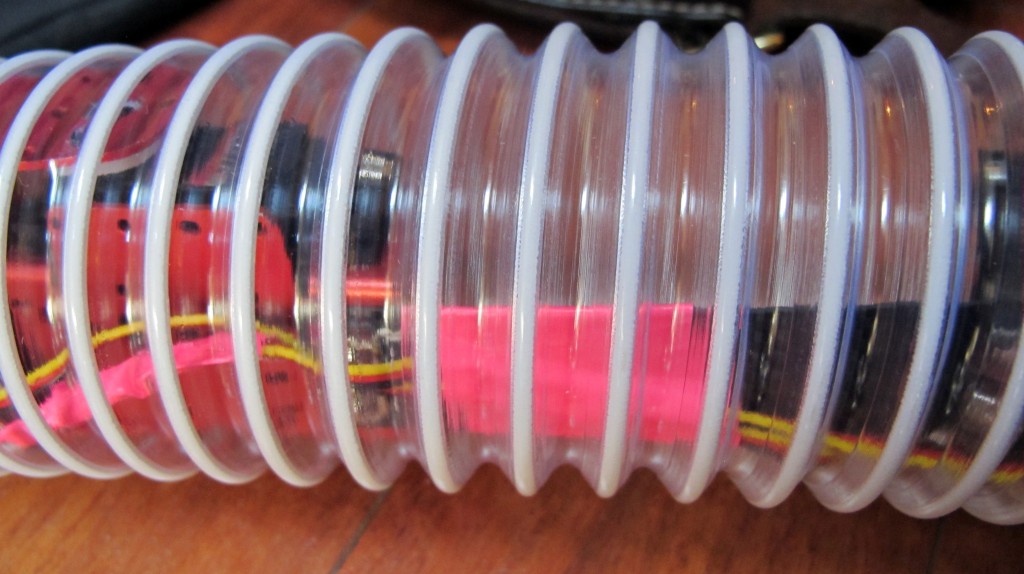
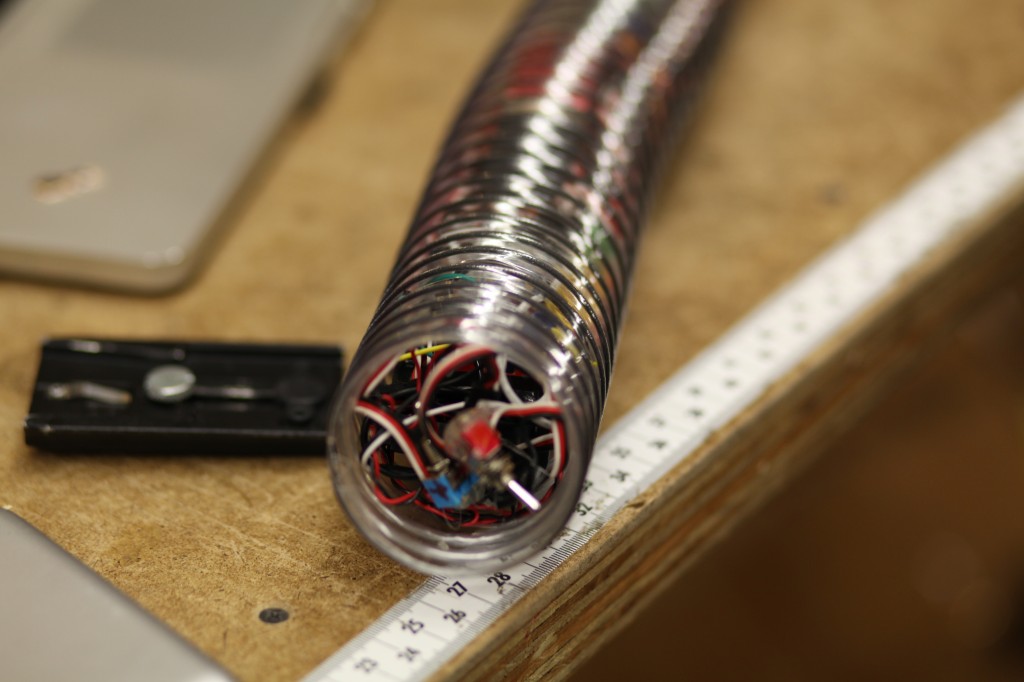
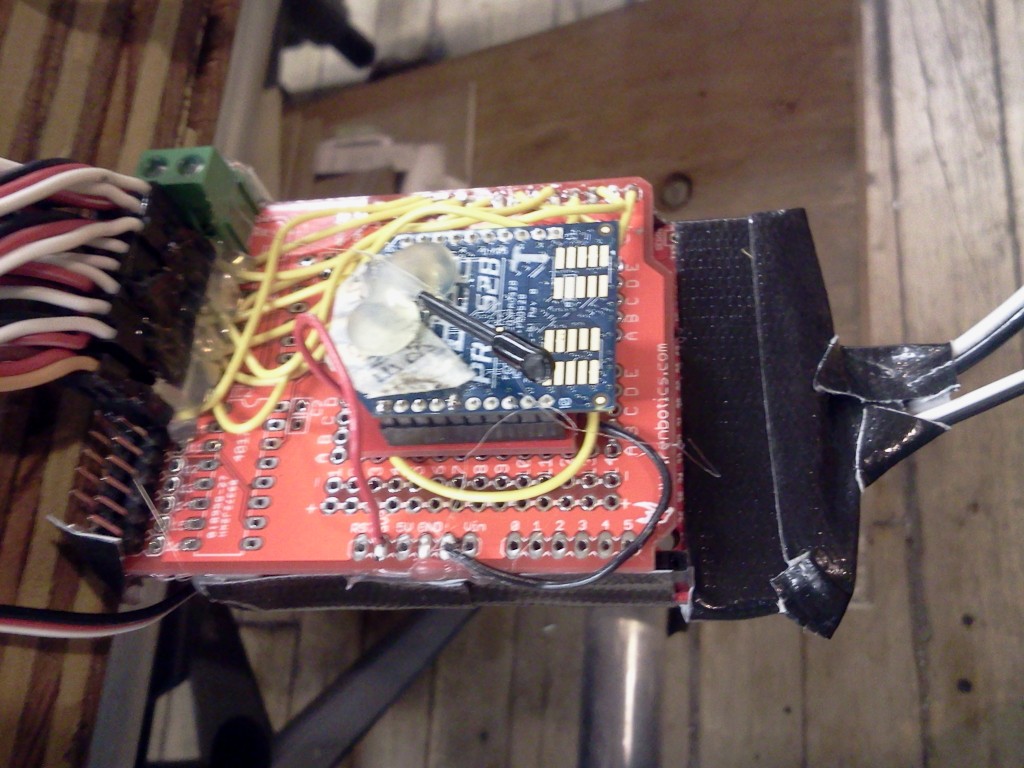
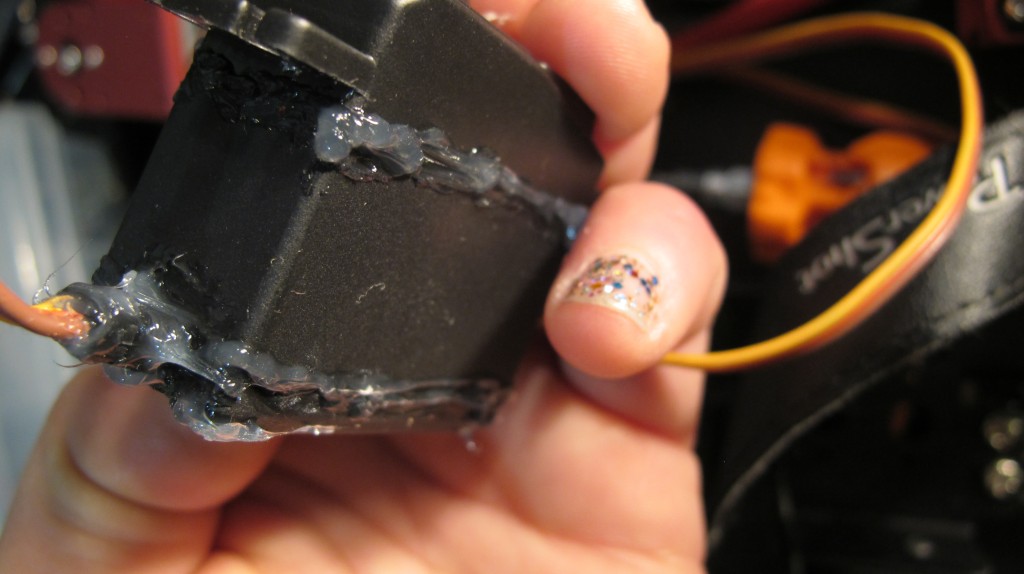
Then I decided that was overkill so I just stuffed everything into the tube (as I had sealed each servo motor with epoxy and had a water tight seal on the tube top and bottom)

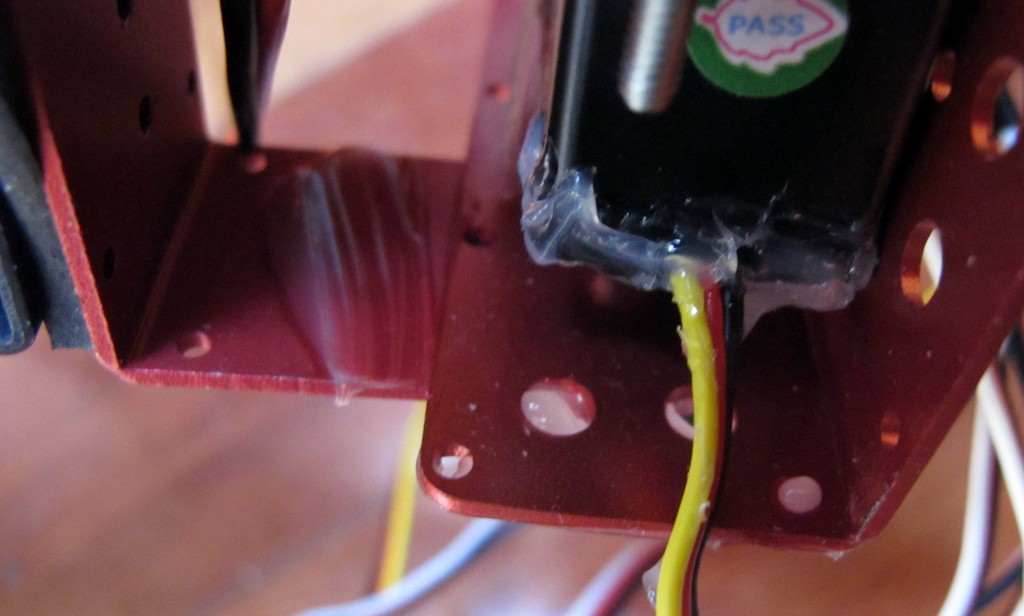
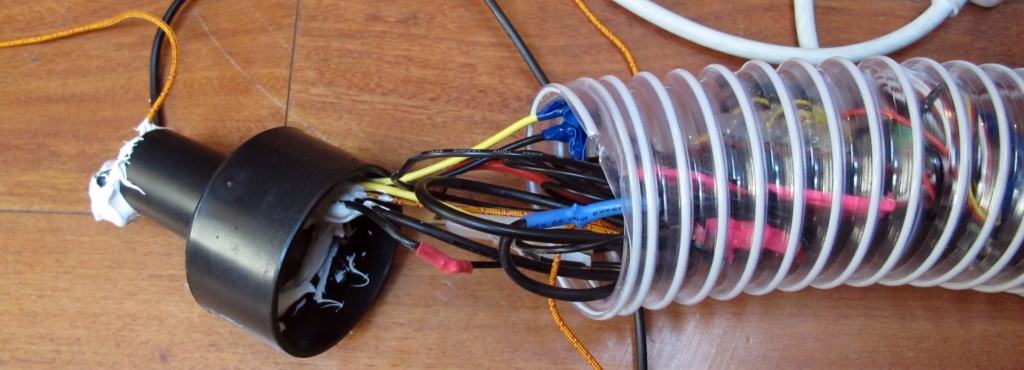
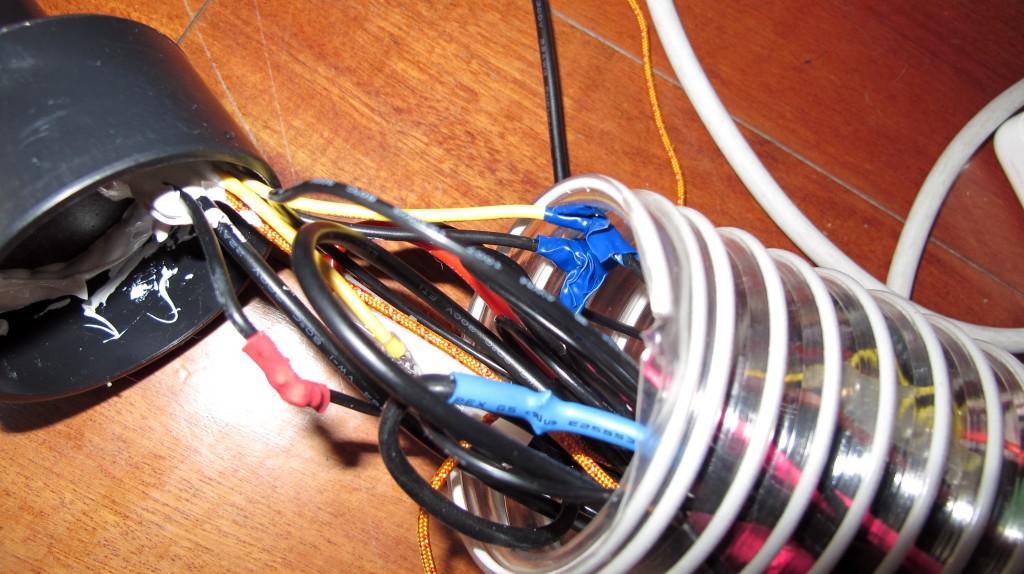
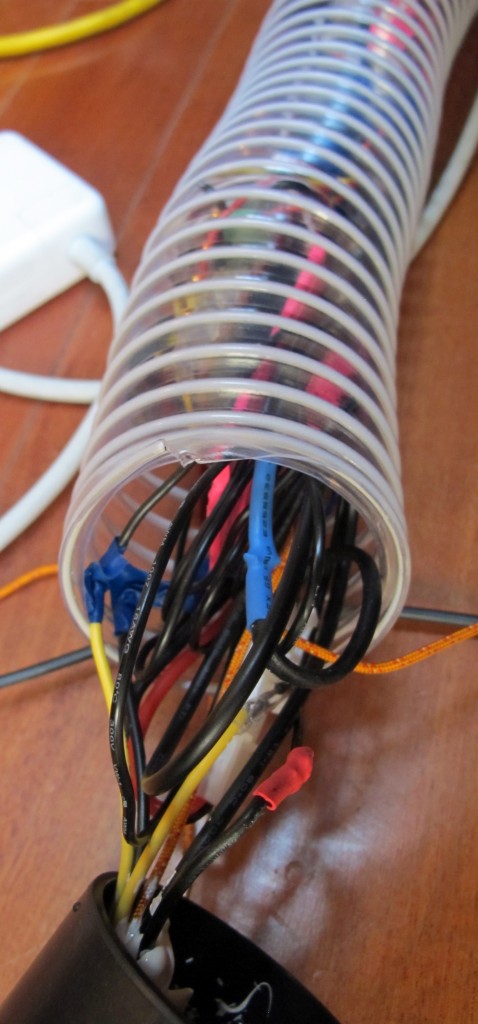
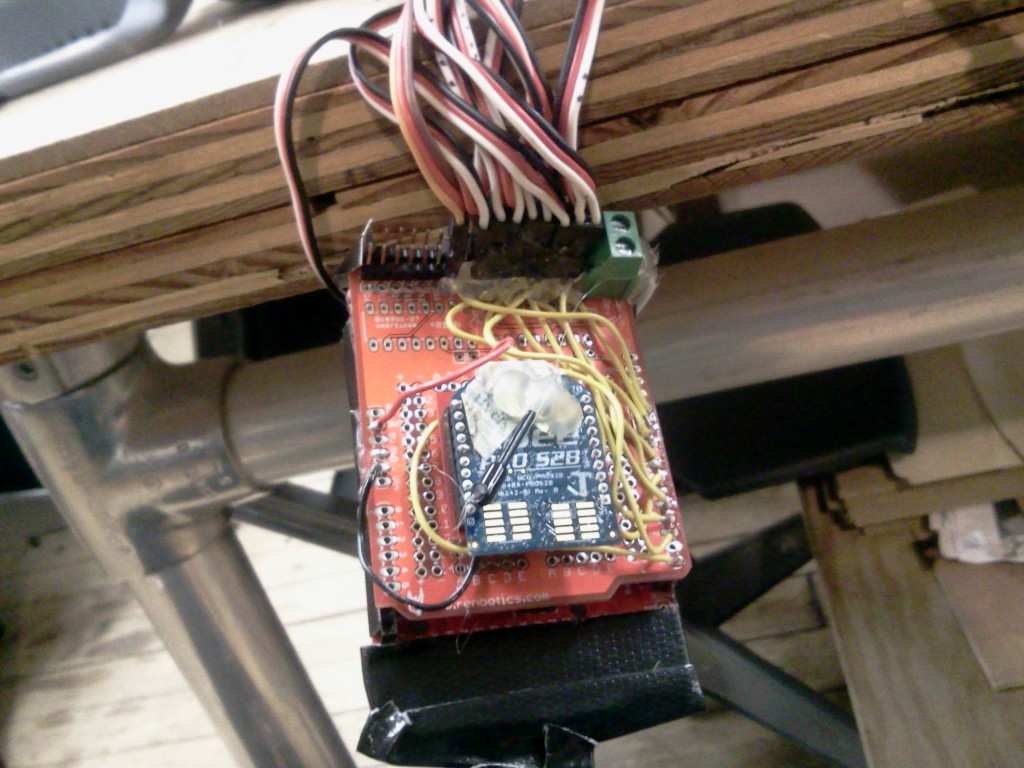
See the waterproofed servos:

See wires etc. stuffed in the tube:



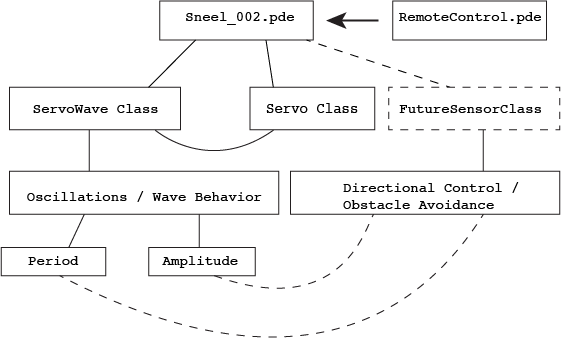
The Software:
A diagram of the control firmware and the relationship between the classes:

I wrote an Arduino library called ServoWave to control period, amplitude and wavelength of the oscillation for Sneel’s swimming behavior.
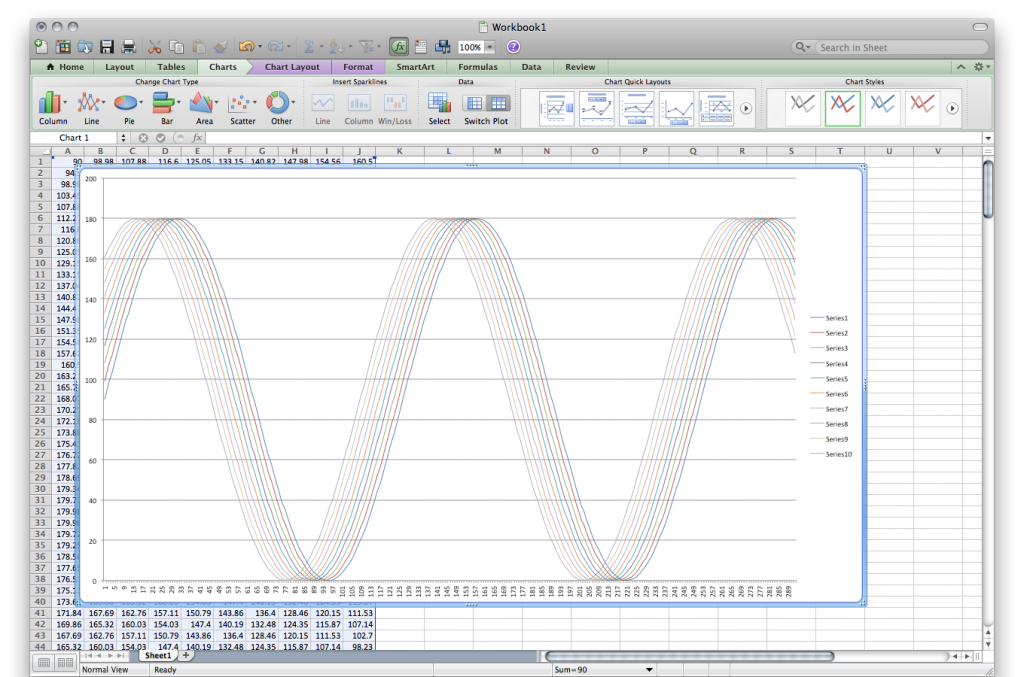
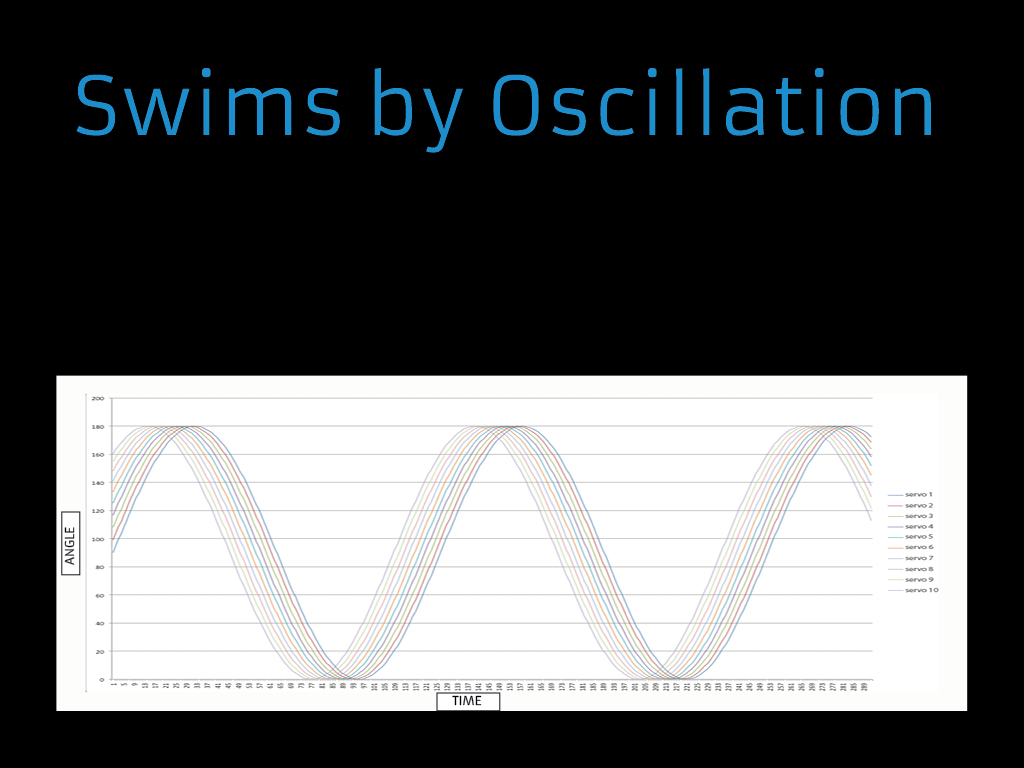
See how each servo motor oscillates – in the following graph, I print out values of each servo as each motor rotates in a sine wave slightly out of phase from each other. The x axis is time and the y axis is angle, and each colored line is a different motor.

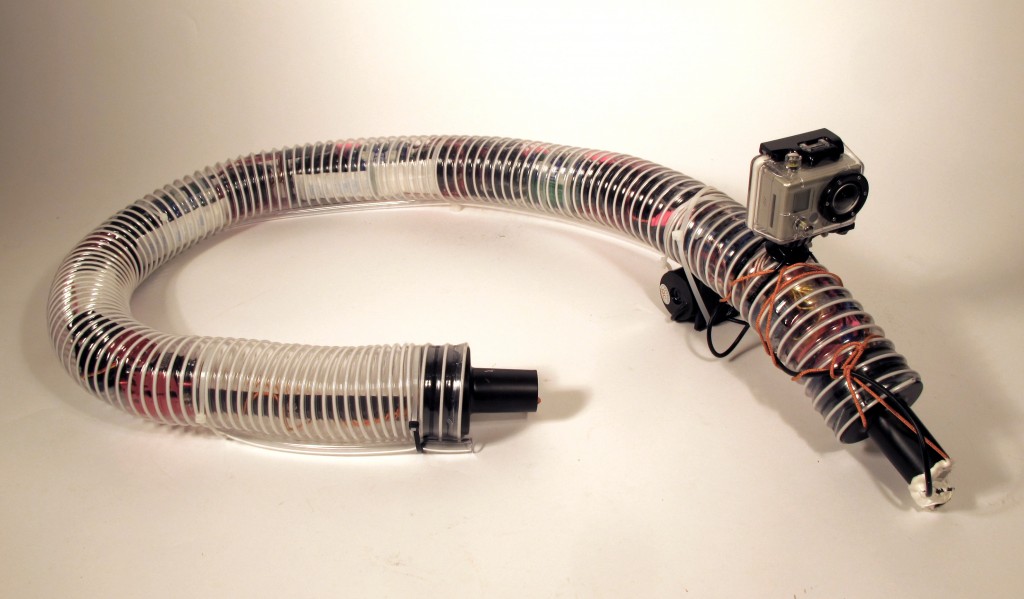
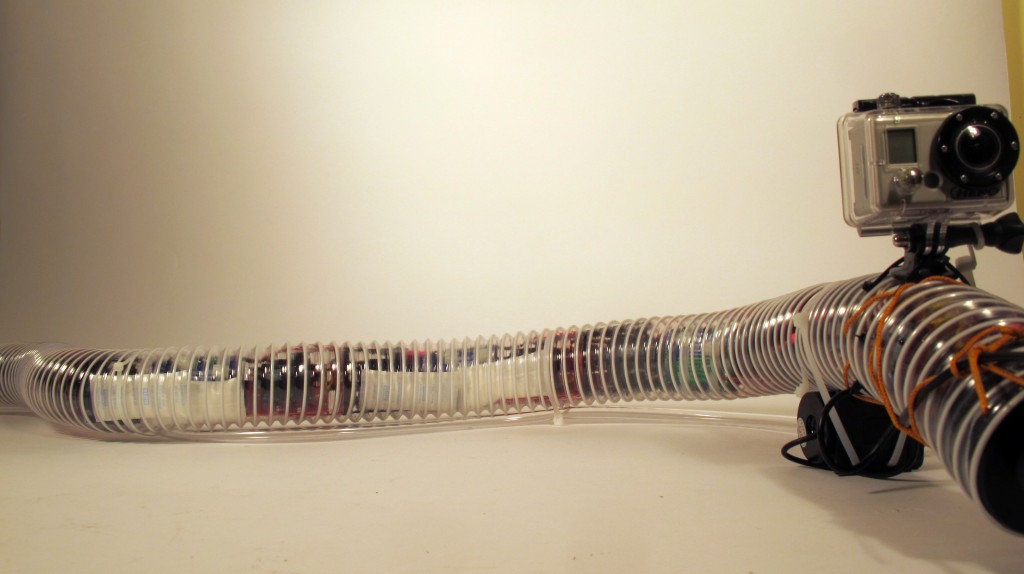
After getting everything packed up in the tube, I tested Sneel_002 on the floor of ITP.
He seemed sort of real:
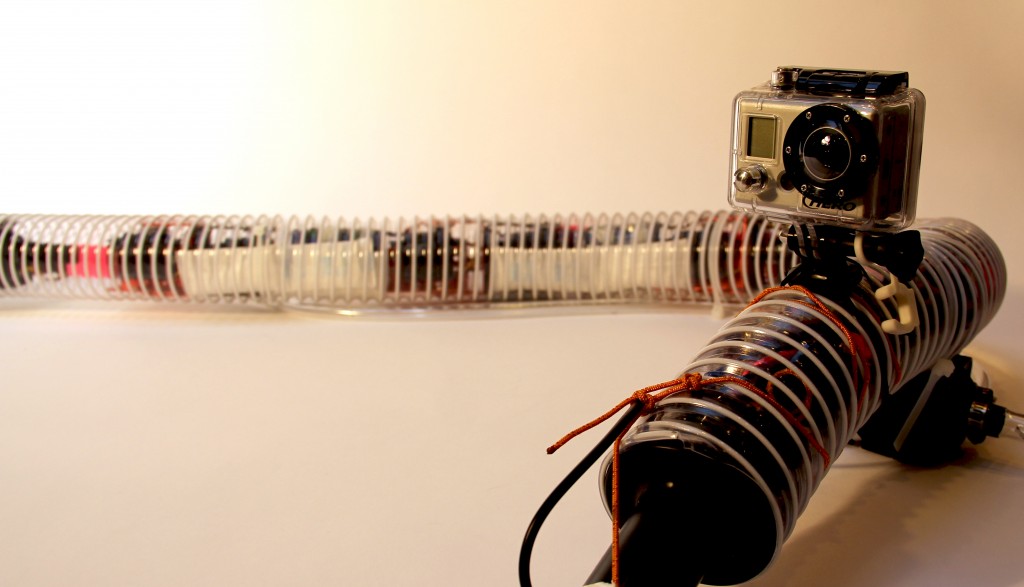
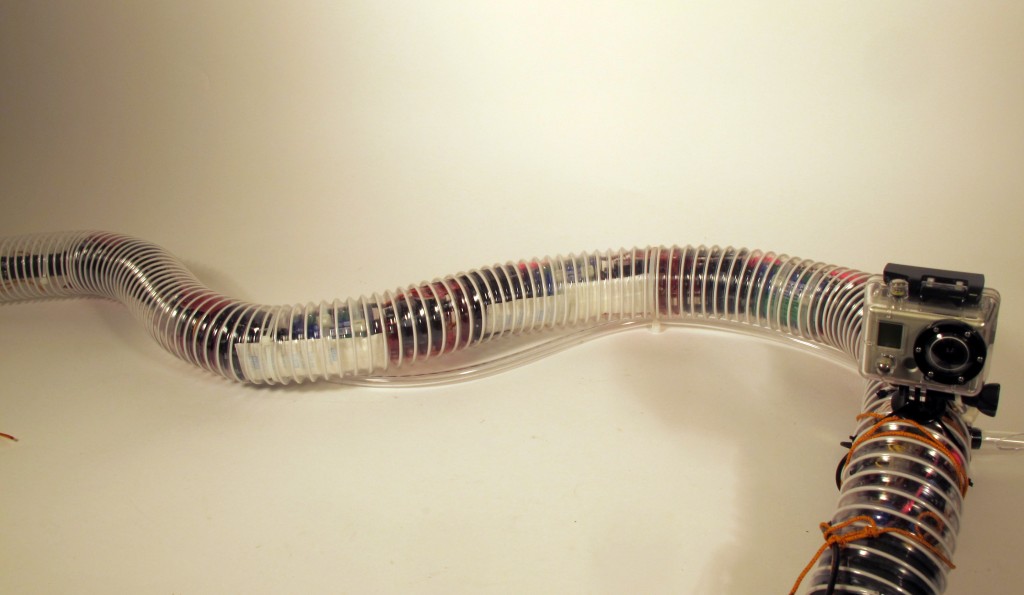
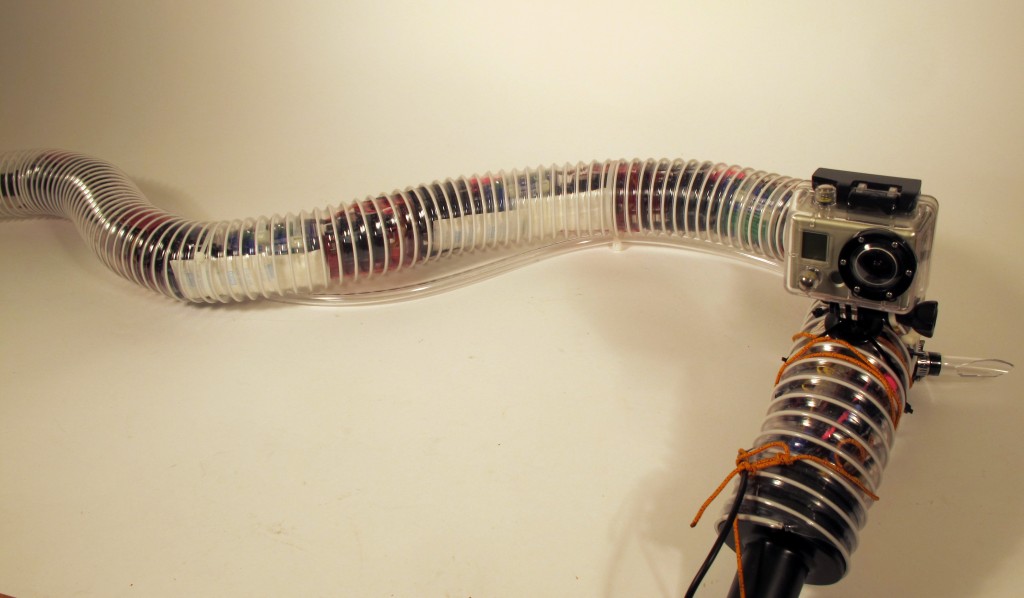
Sneel in the wild:
Well, Sneel_002 swam pretty well, sort of like a real snake, but there’s much work to be done…
Model shot:













Progress ON Snake
 https://vimeo.com/40613436
https://vimeo.com/40613436

a quick start:
questions for consideration:
snake or eel( float or sink)
hydraulic pump?
propeller for forward propagation?
behavioral test – think better about mechanics of aquatic locomotion
______________________________________________________
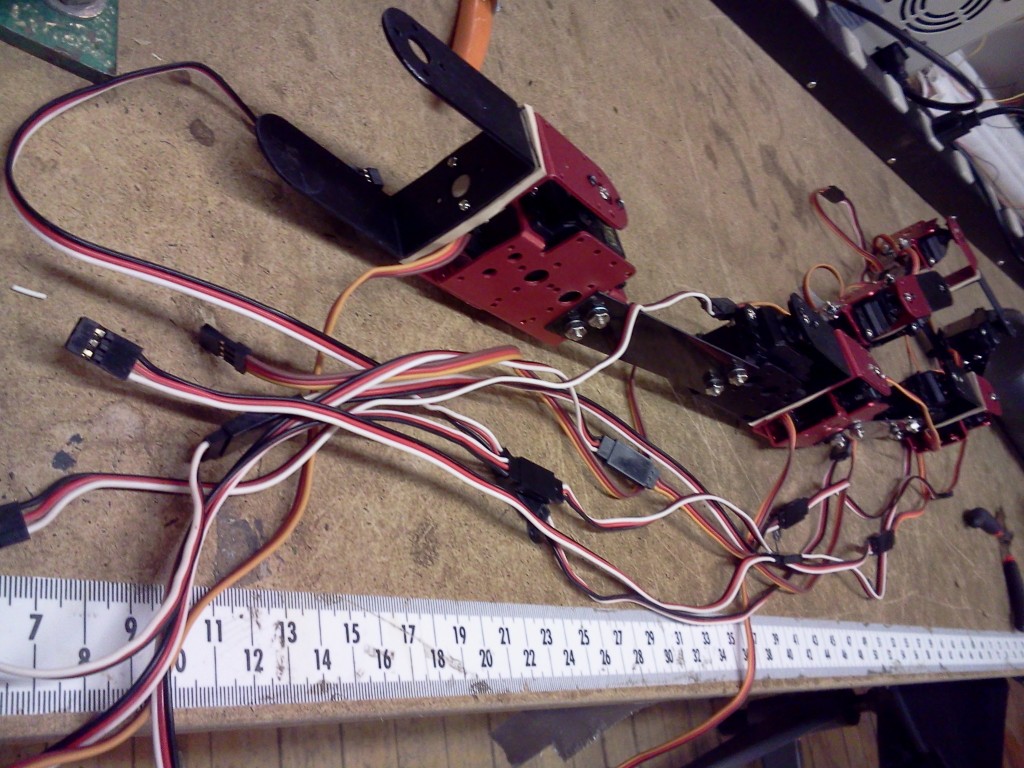
I got the snake into the tube.

Here are some images of the progress:
I think I’ll bring the boat here:

______________________________________________________________________
my email to the p comp list:
It turns out something weird is happening with my batteries – I can run the lipo batteries I have with two DC motors, giving me a current draw of 1800 mAmps (around there anyway when I tested with the multimeter)m, at around 8 V .
When I try to power solely one servo, the voltage drops immediately to below 2 V. The batteries seem to be fully charged , as indicated by the charger I’m using and when I try to give them voltage from a power supply of 8.4 volts at 0.25 mAmps limit, the power supply shuts to 0 (I think this happens with LI ion batteries, a chip prevents over charging if using a regulated power supply…?)
Anyway, what can possibly be preventing me from running one servo with a current rating of 0.3 Amps peak , but I can run DC motors , with 1800 mAmp peak? ?
I can’t figure out what might be wrong – if the battery was damaged, I thought I’d not be able to use it for the DC motors, but since it works fine that way… what can be the problem?
OK another Totally Weird thing is happening:
when I try to test the amperage on one servo by plugging the multimeter in series between the battery +7.4 V and the servo + power , the servo DOES seem to move a bit (slower than when I use just a 6V non rechargeable battery).
When I but without the multimeter in series I get no motion (immediate voltage drop to 1.5 V from 7.4)
What/??
Also, the multimeter is reading 0 amps even when in series with the battery and Vin on the servo
SO I realized I can’t stack it… UGH. I dont understand why I can’t combine two LI ion batteries to make 7.4 V from 3.2 V. WHy?
And now I am using vivitar batteries from cameras, but my voltage regulator, which brings the voltage down to 5.8 V gets super hot. this scares me.
Also, the small servos get super hot. Especially the Emax MD (i’m also using Emax A ).
SO I think I’ll buy some larger servos now, from servocity , as well as perhaps a 6 V NImh battery. Ugh.
TO REMEMBER:
get bigger servos
get new battery
get charger
tighten screws
put more screws on black servos
put on loctite
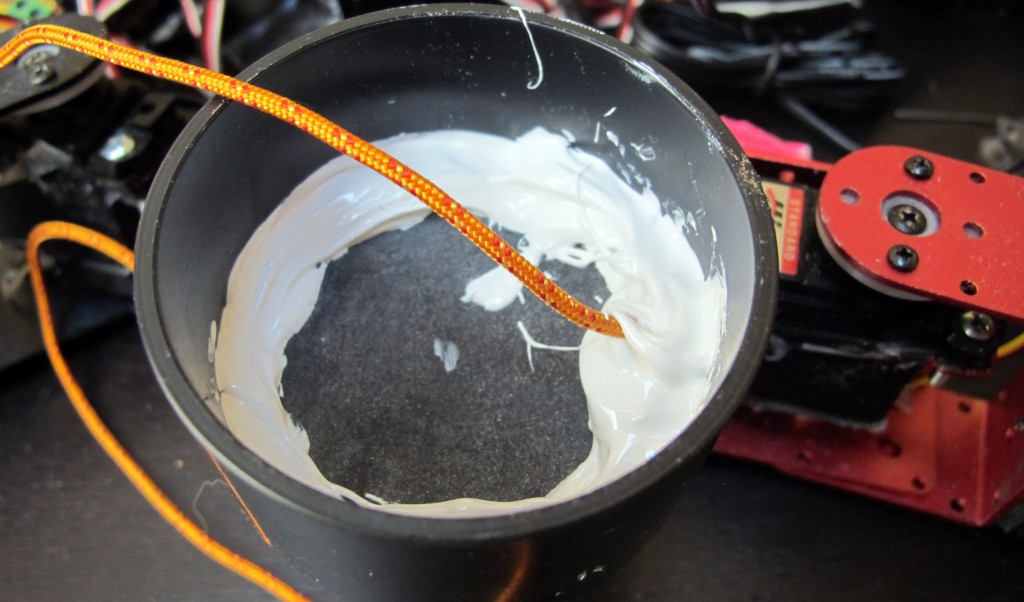
test o rings
put dielectric / marine grease
seal with epoxy the rest of the large servos
get more vacuum tubing
figure out battery pack, arduino power, face, etc
glue rubber
pugs
screws




Comments
0 Responses to Fueling Innovation Through Shared Technology