I started with adding a motor to one of the original octopus experiments I did to see what it looked like:
Then I started thinking more about material and this soft jelly body idea. I came across this video which inspired further experimentation:
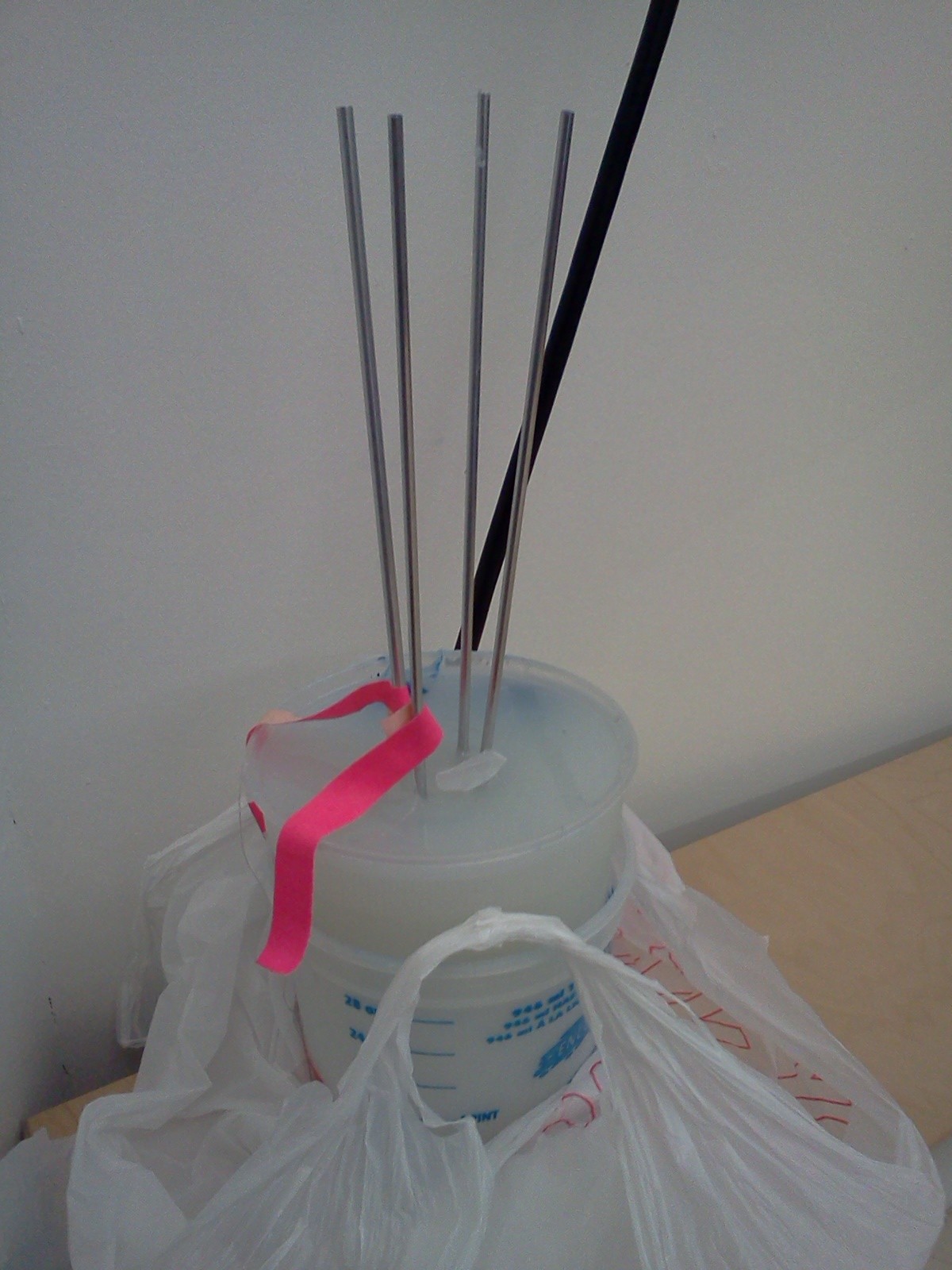
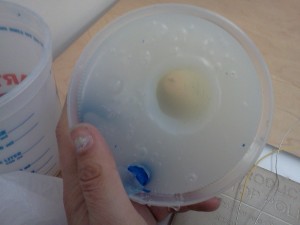
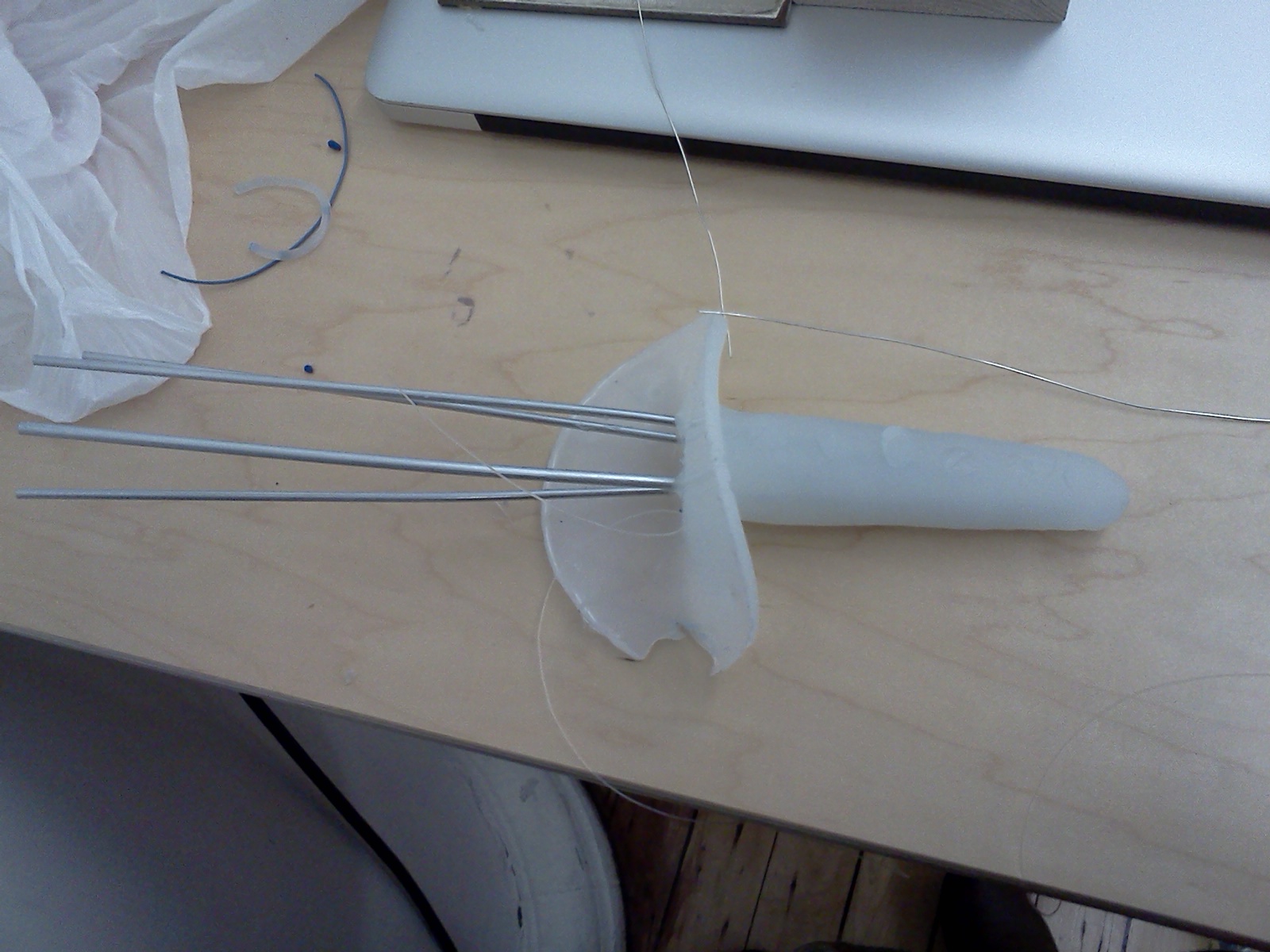
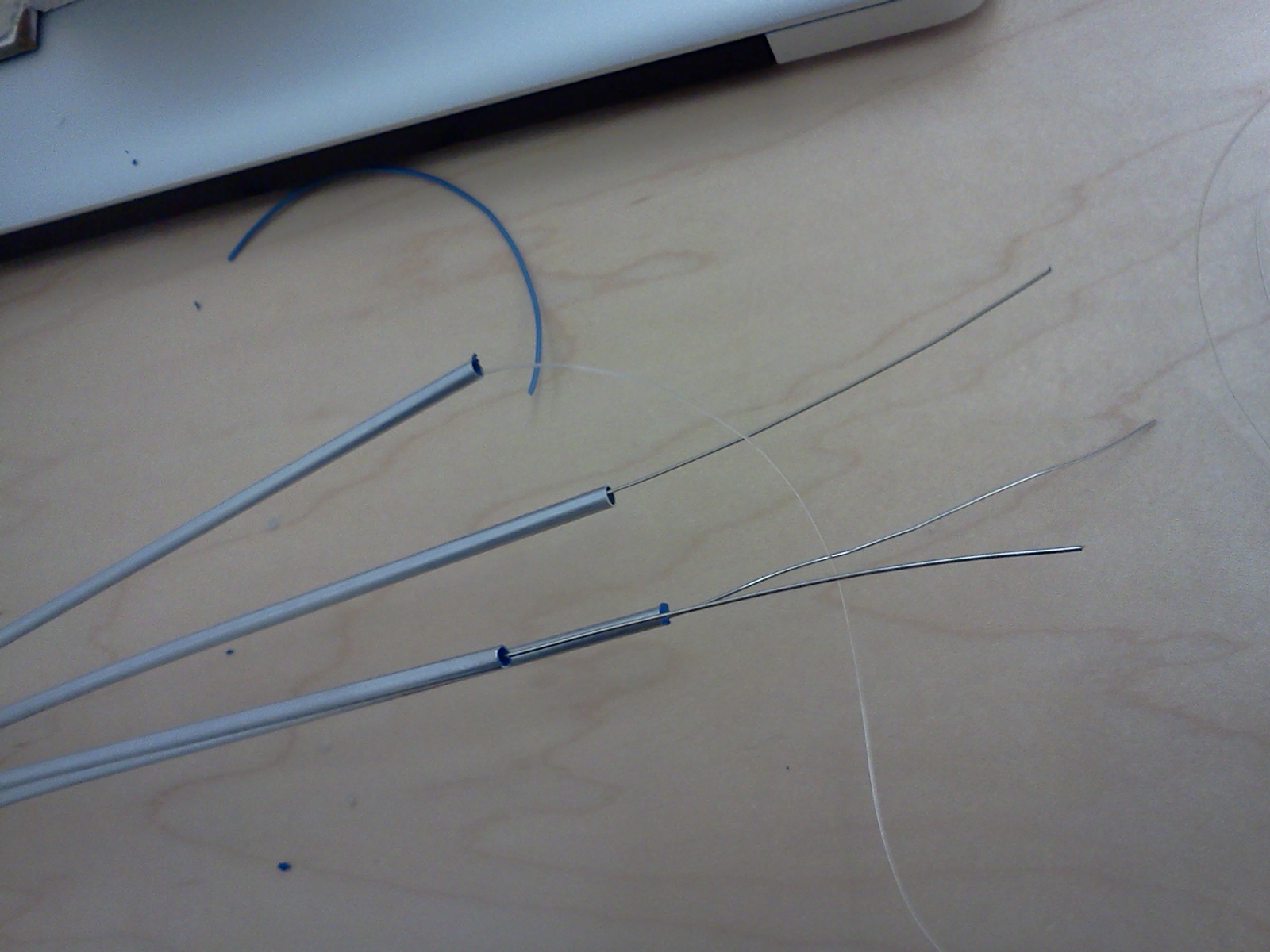
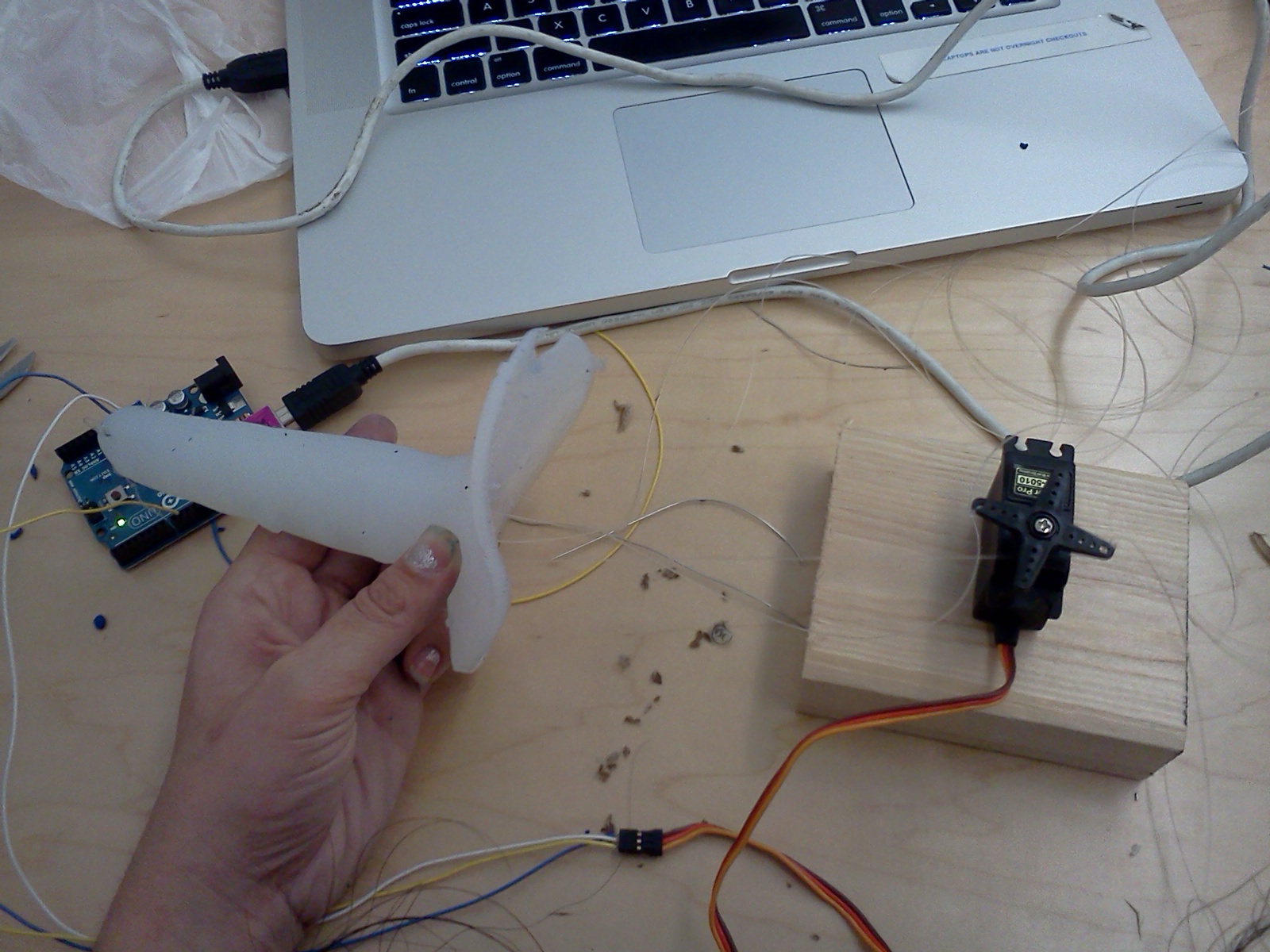
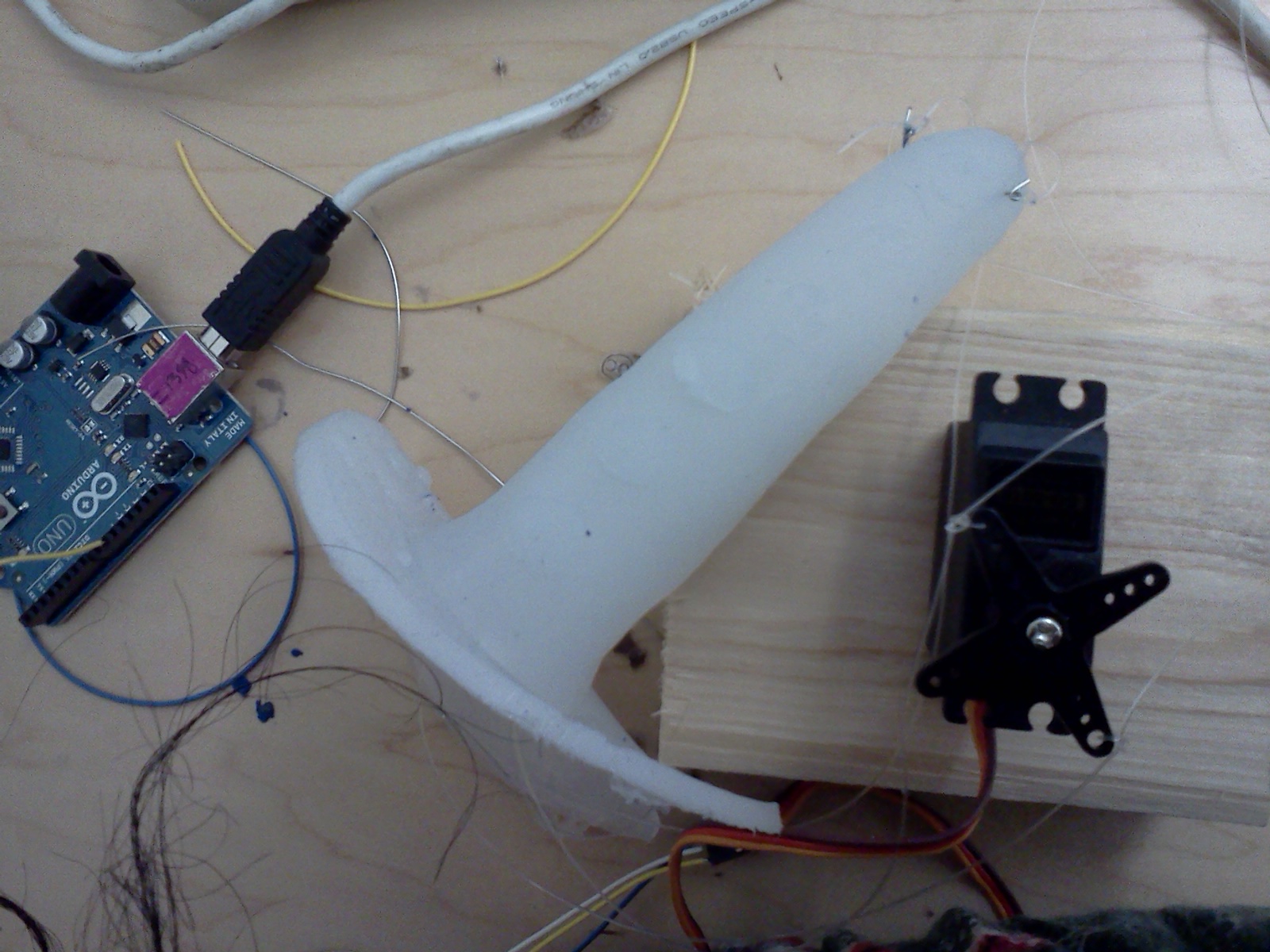
So I decided to experiment with casting a silicon tentacle, either to make up the bulk of the arm, or to provide a skin covering to the mechanisms. I looked at a bunch of different silicons at The Compleat Sculptor and chose the EcoFlex 30. I then cast the mini arm, putting in some channels for cable control. The results are mixed and unfortunately very phallic. I was limited as to size, a thinner, longer design would have been better I think, and I should have used a different method for propping up the channels. I doesn’t work so well on its own, but the texture of the material is nice and may still make a good octopus skin.